
Honeybees teach drones how to navigate
It sounds like science fiction, but also strangely familiar: drones buzzing around, inspecting tomatoes in greenhouses, delivering your package or ...

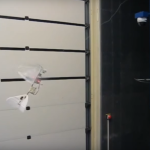
All Eyes, no IMU: Learning Flight Attitude from Vision Alone
Our work on estimating attitude and angular rate with vision alone has been accepted for publication in Nature Portfolio Journals ...

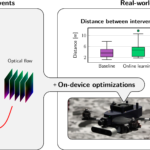
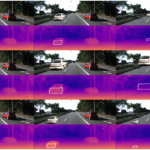
Depth Transfer: Learning to See Like a Simulator for Real-World Drone Navigation
🧠 Bridging the Gap Between Simulation and Reality Training drones to navigate complex environments autonomously is one of the central ...

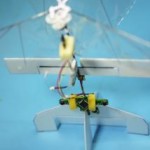
Design and Control of A Tilt-Rotor Tailsitter Aircraft with Pivoting VTOL Capability
Design and Control of A Tilt-Rotor Tailsitter Aircraft with Pivoting VTOL Capability Content: In our newly accepted paper in IEEE ...

Autonomous Drone from TU Delft Defeats Human Champions in Historic Racing First
A team of scientists and students from TU Delft has taken first place at the A2RL Drone Championship in Abu ...
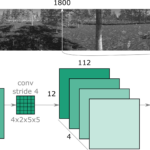
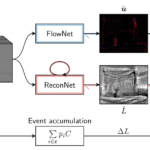
On-Device Self-Supervised Learning of Low-Latency Monocular Depth from Only Events
Our work on online, on-board learning of depth from events has been accepted at CVPR 2025. Event cameras provide low-latency ...
MAVRL: Learn to Fly in Cluttered Environments with Varying Speed
We introduce a novel obstacle avoidance pipeline named Memory-Augmented Varying-speed Reinforcement Learning (MAVRL). MAVRL utilizes depth maps, along with the ...

MAVLab & BioMorphic Lab, winners at IMAV2024 competitions!
Brief: First place at the outdoor competition, first place at the indoor competition, and the best paper award!🥇🥇🥇 The MAVLab ...

EU funding for TUD research on Unmanned Valley
medegefinancierd door de EU The TUDelft MAVlab is pleased to announce together with the municipalities of Katwijk and Wassenaar, the ...

Ant insights lead to robot navigation breakthrough
Inspired by how ants visually recognize their environment and count their steps to navigate back home, MAVLab researchers have developed ...

End-to-end Neural Network Based Optimal Quadcopter Control
In collaboration with ESA’s Advanced Concepts Team, we published our work on end-to-end guidance and control networks in the June ...
Fully neuromorphic vision and control for autonomous drone flight
Our work on fully neuromorphic vision and control for autonomous drone flight has been published in the Science Robotics May ...
Direct learning of home vector direction for insect-inspired robot navigation (ICRA’24)
Abstract Insects have long been recognized for their ability to navigate and return home using visual cues from their nest's ...
ALBERO: Agile Dynamic Perching of Quadrotors on Real Tree Branches
The work from PhD candidate Liming Zheng and Assistant Professor Salua Hamaza from the BioMorphic Intelligence Lab was published in the journal ...

End-to-end neural network based optimal quadcopter control
With an escalating demand for quadcopters in emergency response, inspection and delivery, the need for speed and energy efficiency is ...

Never Landing Drone: Bird-inspired Autonomous Orographic Soaring
Birds display remarkable adaptability in harnessing their surroundings for efficient flight, exemplified by the ingenious behavior observed in Kestrels. These ...

MAVLab @ IMAV 2023
In September, the MAVLab was at the International Micro Air Vehicle (IMAV) Conference and Competition in Aachen! The IMAV is ...
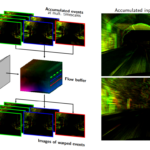
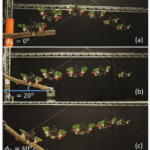
Taming Contrast Maximization for Learning Sequential, Low-latency, Event-based Optical Flow
Federico Paredes-Vallés, Kirk W. Y. Scheper, Christophe De Wagter, Guido C. H. E. de Croon Event cameras have recently gained ...

AvoidBench @ ICRA 2023
At ICRA (IEEE International Conference on Robotics and Automation) 2023, MAVLab presented AvoidBench, a high-fidelity vision-based obstacle avoidance benchmarking suite ...
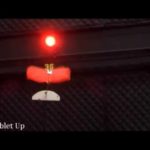
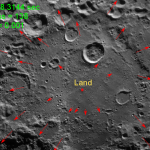
Nature article reveals how flying insects and drones can discern up from down
Researchers from MAVLab and collaborators have developed a new theory on how flying drones and insects can estimate the gravity ...
MAVLab @ IROS 2022
Salua and her team at the MAVLab and the Biomorphic Intelligence Lab have published 6 articles this month, 5 of which ...

IMAV 2022 A Big Success
From September 12th to 16th, we hosted IMAV 2022 in the Netherlands for the second time. The whole event featured ...
Insect-inspired AI for autonomous robots
Insect-inspired AI for autonomous robots Small autonomous mobile robots, such as drones, rovers, and legged robots, promise to perform a ...

Self-flying drones that monitor greenhouse diseases and pests
We have teamed up with Royal Brinkman and start-up Mapture to develop AI and drone technology for greenhouse monitoring. These ...
Self-Supervised Learning of Event-Based Optical Flow with Spiking Neural Networks
Jesse J. Hagenaars*, Federico Paredes-Vallés*, Guido C.H.E. de Croon The field of neuromorphic computing promises extremely low-power and low-latency sensing ...
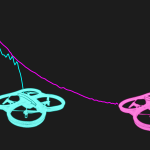
Swarm of autonomous tiny drones can localize gas leaks
A gas leak in a large building or at an industrial site is difficult to find. Human firefighters cannot see ...
Learning process as a Solution to Fundamental Optical-flow Problems
Optical flow for small flying robots Flying insects heavily rely on optical flow for visual navigation and flight control. Roboticists ...
TU Delft maritime hydrogen drone flies longer and greener
A drone that can fly sustainably for long distances over land and water, and can land almost anywhere, will be ...

Neuromorphic control for optic-flow-based landings of MAVs using the Loihi processor
Neuromorphic processors like Loihi offer a promising alternative to conventional computing modules for endowing constrained systems like micro air vehicles ...
Back to Event Basics: Self-Supervised Learning of Image Reconstruction for Event Cameras via Photometric Constancy
F. Paredes-Valles, G. C. H. E. de Croon Event cameras are novel vision sensors that sample, in an asynchronous fashion, ...

PercEvite Symposium on 26 June 2020
On 26th of June, we will host a symposium on sense and avoid technologies for small drones. The Percevite Symposium ...
MAVLab wins the AlphaPilot AI challenge
We are very proud to officially announce that we have won the AlphaPilot AI Drone Racing Innovation challenge! The challenge, ...
Swarm of tiny drones explores unknown environments
We have succeeded in making a swarm of tiny drones that can autonomously explore unknown environments. This achievement, published in ...

VTOL winged drone for Maritime Operations
Design and Testing of a Vertical take-off and Landing UAV optimized for carrying a Hydrogen Fuel-cell with Pressure Tank The ...

U-space: Drone airspace integration
Fully autonomous drones safely made way for the high priority drones above TU Delft campus. About VUTURA VUTURA (Validation of ...

Off to IMAV 2019
As is tradition, we will attend IMAV this year, which will be taking place in Madrid. IMAV offers a unique ...
Pelican drone ensures super quick water sampling
Good water quality is important to humans and to nature. In a country with as much water as the Netherlands ...
How Google’s sorting algorithm helps us develop swarms of drones
Our recent paper use Google's PageRank algorithm to evaluate and optimize the behavior of swarms in a computationally efficient way, ...

VUTURA
NOS.nl (national news agency in the Netherlands) - Een luchtruim vol drones – hoe organiseer je dat? https://nos.nl/artikel/2291645-een-luchtruim-vol-drones-hoe-organiseer-je-dat.html Video-item: https://nos.nl/video/2291677-hoe-ontwijkt-de-ene-drone-de-andere-als-het-vol-wordt-in-het-luchtruim.html ...

The world’s smallest autonomous racing drone
The drone racing team of the MAVLab has presented the currently smallest autonomous racing drone in the world. The drone ...

MAVLab selected for the next phase of AlphaPilot
Lockheed Martin and the Drone Racing League (DRL) have announced the nine teams that were accepted into the 2019 AlphaPilot ...
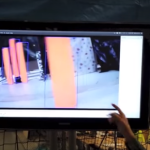
How deep neural networks see distances in a single image
TU Delft scientists have uncovered how deep neural networks see distances in a single image. They report on their findings ...
Featured in “de Volkskrant”: “Learning about about animals? Build a robotic version of them”
Dr. ir. Guido de Croon was featured on an article in the major Dutch newspaper, "de Volkskrant", wherein he discussed ...

DroneClash 2019: high-tension, high tech and good humoured.
Saturday March 16th 2019: heavy rain and strong winds. No matter for the 500 odd people who gathered in Katwijk’s ...

Drones prepare to do battle with nets, balls and a Tesla Coil at DroneClash 2019 (bright sparks included!)
Monday 11th March 2019, Delft, the Netherlands. How do you take down a drone? This is the question being asked ...
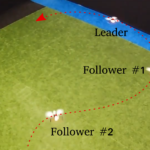
Robust indoor flight by a team of small drones
Teams of autonomous drones could be used in rescue missions, exploration, and more. How can we enable them to fly ...
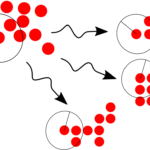
A novel algorithm for emergent patterns by swarms of simple robots
Small robots have limited perception and processing power. This is an inconvenient truth that we have to deal with. With ...

Delfy Nimble on NPO
The Delfly Nimble was featured on the program "Kleine beestjes: de superhelden van de aarde" ("Small beasts: the superheroes of ...

DroneClash 2019: the bravest and best in counter-drone tech
Public awareness of drones has risen dramatically over recent months. In the wake of the Gatwick drone incidents, the word ...

First place and innovation award at IMAV 2018
A team of TU Delft and ENAC researchers has won the overall 1st prize at the outdoor competition of the ...

MAVLAB off to IMAV 2018
Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take ...

Pelican Drone
Besides dikes, the Netherlands are well known for its many lakes and rivers. It is difficult and labor intensive to ...
DelFly Nimble
The DelFly Nimble, a new bio-inspired robot developed by MAVLab and employed for insect-flight research, is featured on the cover ...

New PhD student: Tom van Dijk
We are happy to introduce a new Ph.D. student - Tom van Dijk - within the project "PercEvite: Sense and ...

Paper: Towards a swarm with pocket drones – IROS 2017
In a previous post, we showed that a tiny 40-gram pocket drone can fly autonomously inside a room. Now we ...

3rd place (and more) at the IMAV2017
With a 3rd place prize, a best paper prize and a best system prize at the 2017 installation of the ...

Control of the Cyclone Hybrid UAV
Cyclone In cooperation with the dronelab of ENAC in Toulouse, we have developed a hybrid UAV, called 'Cyclone'. It is ...

Towards an autonomous pocket drone for indoor navigation
In recent experiments, we were able to show a 40-gram pocket drone flying inside an indoor environment, autonomously, using nothing ...

New PhD student: Diana Olejnik
We are happy to introduce a new Ph.D. student. Diana Olejnik within the project: “Bio-inspired control and design of flapping ...

DroneClash announces first two counter-drone measures
DroneClash, the first ever counter-drone competition, is announcing two of the counter-drone measures that teams must tackle during the game ...

First Anti-Drone Race
DroneClash To incorporate drones in our lives in a good and safe way, we need anti-drone instruments. On 13 February ...

Introduction to Paparazzi Autopilot
Parapazzi Introductory Course Please find the introduction to vision based control with the paparazzi autopilot on a Bebop in an ...
Flapping Wing Modelling
Model identification of small flapping wing vehicles with unsteady aerodynamics requires new approaches. Publications [bibtex author="Armanini|Caetano" file="https://github.com/tudelft/publications/raw/master/pure.bib" group=year sort=year order=entrytype ...

Swarm Exploration with Pocketdrones
The aim of this project is to investigate and design an autonomous swarm of Micro Air Vehicles (MAVs)to do multi-robot ...


TU Delft becomes second in first autonomous drone race
The MAV-lab team of students and researchers has become second in the first ever autonomous drone race, which took place ...
Open Source Iridium Communication IRIDIUM CORE IR9523 Carrier Board
Iridium The MavLab released v1.0 of their Iridium Satellite Communication System. Overall it acts as a transparent link with serial ...

Drone learns “to see” in zero-gravity
During an experiment performed on board of the International Space Station (ISS) a small drone successfully learned by itself to ...

DELFTACOPTER – Outback Medical Express
DELFTACOPTER is a hybrid electric UAV with exceptional efficiency both in hovering and fast forward flight. It is equipped with state ...

Guest Lecture: Prof. Guszti Eiben and The First Robotic Baby
Professor Guszti Eiben from the Vrije Universiteit Amsterdam will be coming to our faculty at 10:00 on the 18th of ...
New theory allows drones to see distances with one eye
A new theory has been published that allows drones to see distances with a single camera. TU Delft’s Micro Air ...

Extremely light-weight Autonomous MAVs
Micro Air Vehicles (MAVs) are becoming ever smaller and lighter. This opens new areas of application, mainly because of the ...

BERISUAS Project Successfully Finished
The MAVLab finished the Interreg project BERISUAS, BEtter Response and Improved Safety through Unmanned Aircraft Systems: http://www.berisuas.eu/ ...


BERISUAS International Test – UAS in Maritime Incident Response
On Saturday, June 18th the first international test with deploying an Unmanned Aerial Vehicle (UAV) to aid in combating an ...

Festo BionicANT
The Festo BionicANT program is using the stereo-vision system developed at the MavLab. https://www.festo.com/group/de/cms/10157.htm All details of the BionicANT can ...

Cyber Zoo Opened
The opening of the TU Delft Cyber Zoo was Wednesday 5th of March. The Cyber Zoo is a new research and ...
Optical Flow based Slope Estimation
Our open-source "Optical Flow based Slope Estimation" code can be found: first_release_OF_slope_estimation publication: [bibtex file="https://github.com/tudelft/publications/raw/master/pure.bib" key=a0abc18b3ee04b4eaac9c3907a07dd49 highlight="optic|flow|slope|estimation"] ...

Innovation Awards
DelFly Explorer is selected to participate at the Innovation Awards: https://innovation-awards.nl/concept/delfly-explorer/ ...

BERISUAS Symposium
BERISUAS stands for "Better response and improved safety through UAS" Read the BERISUAS Publication Project Video: TU Delft is the ...



Outback UAV Challenge 2014 (team OpenUAS)
http://www.uavoutbackchallenge.com.au/ www.uavchallenge.csiro.au/galleries/2014/open_uas/open_uas.php ...




Evolutionary Robotics for Micro Air Vehicles
Small robots with limited computational and sensory capabilities are becoming more commonplace. Designing effective behavior for small robotic platforms to ...

DelFly Explorer
TU Delft researchers have developed the DelFly Explorer, the world's first Micro Air Vehicle with flapping wings that can avoid obstacles ...


LISA-S: “the world’s smallest open source autopilot”
he Micro Aerial Vehicle Laboratory at the TU Delft faculty of Aerospace Engineering has designed, built and tested the world’s ...

Hybrid MAV wins 1st prize at DSE Symposium
The objective of this project was to design a system of multiple MAVs capable of flying in a swarm to ...


Swarm of Hybrid UAVs for the Acquisition of Distributed Measurements
A Swarm of Hybrid UAV can perform measurements in a large area. To cover this area, the drones need quite ...

Project Explorer
The TU Delft participated in Project Explorer to enhance the operational possibilities of unmanned aerial vehicles for use by Police, ...
Intelligent Vision-based Landing System of UAVs
Background The capability of Unmanned Aerial Vehicles (UAVs) to perform landing task is essential for the autonomous operation, especially when ...


Hear and Avoid
Being allowed to operate an Unmanned Aerial Vehicle (UAV) in operational airspace requires certification of the aircraft while guaranteeing the ...


DelFly Micro is the smallest camera equipped aircraft in the world
DelFly Micro is the "Smallest camera equipped Airplane" is the world (*Guiness Book of Records 2008). Read the full TUDelft article ...
Autonomous flight of Micro to Nano Air Vehicles
The challenges in the autonomous flight of MAVs derive from the stringent weight and power requirements of MAVs. For example, ...