Our work on fully neuromorphic vision and control for autonomous drone flight has been published in the Science Robotics May 2024 issue.
In this work, we have developed a drone that flies autonomously using neuromorphic image processing and control based on the workings of animal brains. Animal brains use less data and energy compared to current deep neural networks running on GPUs (graphics chips). Neuromorphic processors are therefore very suitable for small drones because they don’t need heavy and large hardware and batteries. The results are extraordinary: during flight the drone’s deep neural network processes data up to 64 times faster and consumes three times less energy than when running on a GPU. Further developments of this technology may enable the leap for drones to become as small, agile, and smart as flying insects or birds.
Learning from animal brains: spiking neural networks
Artificial intelligence holds great potential to provide autonomous robots with the intelligence needed for real-world applications. However, current AI relies on deep neural networks that require substantial computing power. The processors made for running deep neural networks (Graphics Processing Units, GPUs) consume a substantial amount of energy. Especially for small robots like flying drones this is a problem, since they can only carry very limited resources in terms of sensing and computing.
Animal brains process information in a way that is very different from the neural networks running on GPUs. Biological neurons process information asynchronously, and mostly communicate via electrical pulses called spikes. Since sending such spikes costs energy, the brain minimizes spiking, leading to sparse processing.
Inspired by these properties of animal brains, scientists and tech companies are developing new, neuromorphic processors. These new processors allow to run spiking neural networks and promise to be much faster and more energy efficient.
Whereas digital spiking neurons only need to add integers, standard neurons have to multiply and add floating point numbers. This makes spiking neural networks quicker and more energy efficient. This energy efficiency is further boosted if neuromorphic processors are used in combination with neuromorphic sensors, like neuromorphic cameras. Such cameras do not make images at a fixed time interval. Instead, each pixel only sends a signal when it becomes brighter or darker. The advantages of such cameras are that they can perceive motion much more quickly, are more energy efficient, and function well both in dark and bright environments. Moreover, the signals from neuromorphic cameras can feed directly into spiking neural networks running on neuromorphic processors. Together, they can form a huge enabler for autonomous robots, especially small, agile robots like flying drones.
First neuromorphic vision and control of a flying drone
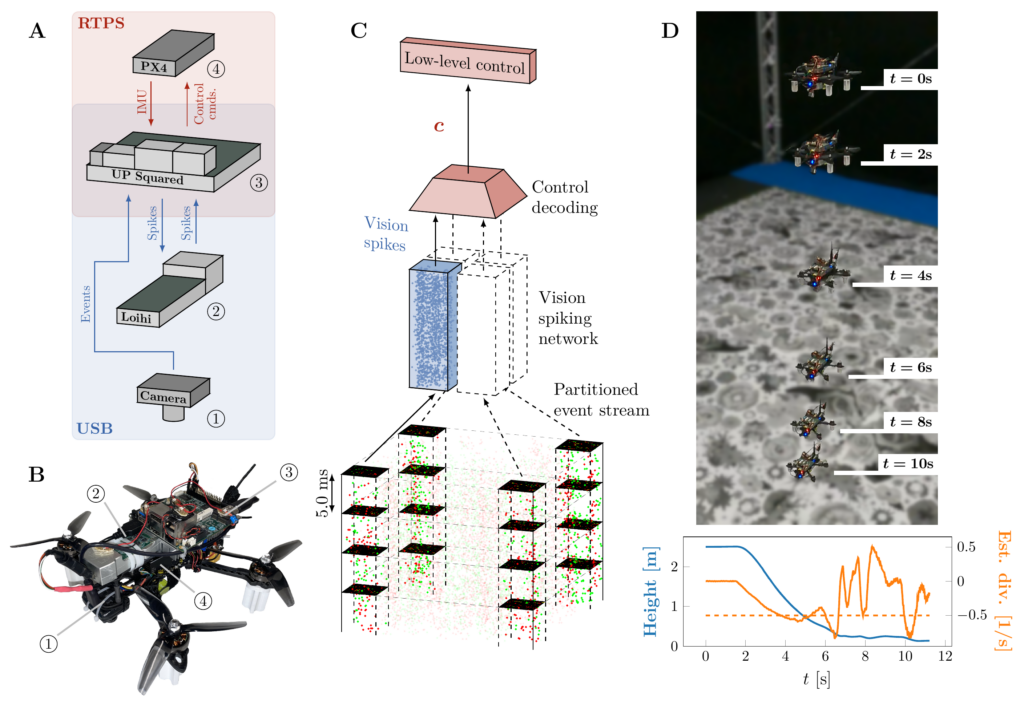
In the spirit of utilizing biological principles for efficient drone flight, we demonstrate for the first time a drone that uses neuromorphic vision and control for autonomous flight. Specifically, we developed a spiking neural network that processes the signals from a neuromorphic camera and outputs control commands that determine the drone’s pose and thrust. We deployed this network on a neuromorphic processor, Intel’s Loihi neuromorphic research chip, on board of a drone. Thanks to the network, the drone can perceive and control its own motion in all directions.
“We faced many challenges,” says Federico Paredes-Vallés, one of the researchers that worked on the study, “but the hardest one was to imagine how we could train a spiking neural network
To make the network both train sufficiently fast and function well on the real robot, we designed a network consisting of two modules. The first module learns to visually perceive motion from the signals of a moving neuromorphic camera. It does so completely by itself, in a self-supervised way, based only on the data from the camera. This is similar to how also animals learn to perceive the world by themselves. The second module learns to map the estimated motion to control commands, in a simulator. This learning relied on an artificial evolution in simulation, in which networks that were better in controlling the drone had a higher chance of producing offspring. Over the generations of the artificial evolution, the spiking neural networks got increasingly good at control, and were finally able to fly in any direction at different speeds.
With its neuromorphic vision and control, the drone is able to fly at different speeds under varying light conditions, from dark to bright. It can even fly with flickering lights, which make the pixels in the neuromorphic camera send great numbers of signals to the network that are unrelated to motion.
Improved energy efficiency and speed by neuromorphic AI
Importantly, our measurements confirm the potential of neuromorphic AI. The network runs on average between 274 and 1600 times per second. If we run the same network on a small, embedded GPU, it runs on average only 25 times per second, a difference of a factor ~10-64! Moreover, when running the network, Intel’s Loihi neuromorphic research chip consumes 1.007 watts, of which 1 watt is the idle power that the processor spends just when turning on the chip. Running the network itself only costs 7 milliwatts. In comparison, when running the same network, the embedded GPU consumes 3 watts, of which 1 watt is idle power and 2 watts are spent for running the network. The neuromorphic approach results in AI that runs faster and more efficiently, allowing deployment on much smaller autonomous robots.
Future applications of neuromorphic AI for tiny robots
Neuromorphic AI will enable all autonomous robots to be more intelligent, but it is an absolute enabler for tiny autonomous robots. At Delft University of Technology’s Faculty of Aerospace Engineering, we work on tiny autonomous drones which can be used for applications ranging from monitoring crop in greenhouses to keeping track of stock in warehouses. The advantages of tiny drones are that they are very safe and can navigate in narrow environments like in between ranges of tomato plants. Moreover, they can be very cheap, so that they can be deployed in swarms. This is useful for more quickly covering an area, as we have shown in exploration and gas source localization settings.
The current work is a great step in this direction. However, the realization of these applications will depend on further scaling down the neuromorphic hardware and expanding the capabilities towards more complex tasks such as navigation.
Relevant links
Open-access paper
Datasets
Code
Experiment videos
2024 |
Fully neuromorphic vision and control for autonomous drone flight Journal Article In: Science Robotics, vol. 9, no. 90, pp. eadi0591, 2024. |