



Design and Testing of a Vertical take-off and Landing UAV optimized for carrying a Hydrogen Fuel-cell with Pressure Tank.
Micro Air Vehicle Lab – TUDelft
Design and Testing of a Vertical take-off and Landing UAV optimized for carrying a Hydrogen Fuel-cell with Pressure Tank.

Fully autonomous drones safely made way for the high priority drones above TU Delft campus.

IMAV offers a unique mix of a competition and a conference. This year, we will take part in the indoor competition in a joint team with the start-up XOSight, as well as present 4 papers.
researchers from TU Delft have developed a ‘pelican drone’: a drone capable of taking water samples quickly, in combination with a measuring instrument that immediately analyses the water quality.
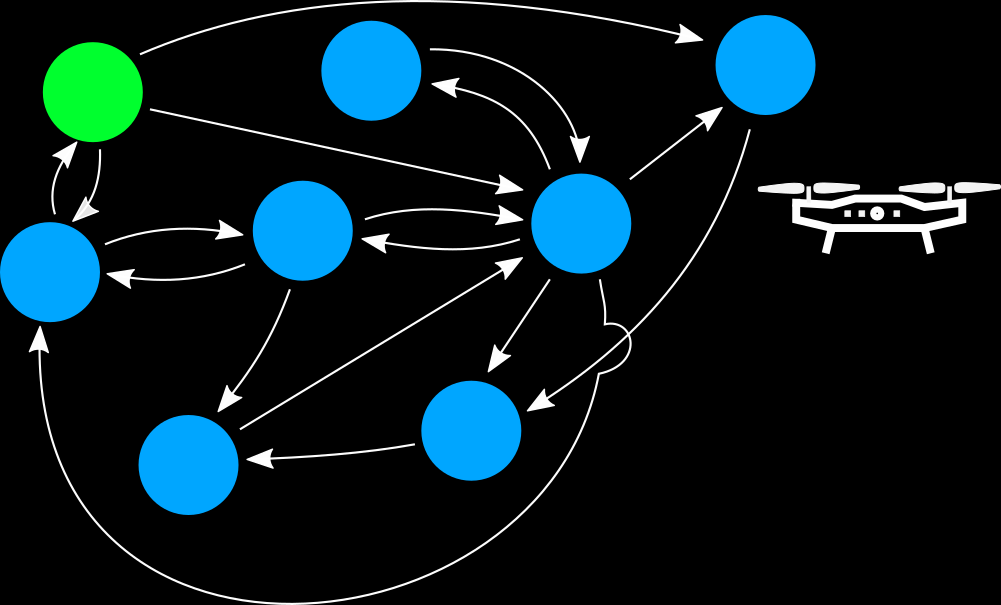
Our latest paper uses the Google PageRank algorithm to evaluate and optimize the behavior of swarms in a computationally efficient way, aimed at making swarms that are scalable, flexible, and robust.

NOS.nl (national news agency in the Netherlands) – Een luchtruim vol drones – hoe organiseer je dat? Video-item: https://nos.nl/video/2291677-hoe-ontwijkt-de-ene-drone-de-andere-als-het-vol-wordt-in-het-luchtruim.html 8PM news item https://nos.nl/uitzending/42752-nos-journaal.html at 09:55 BNR (Business …

The drone racing team of the MAVLab has presented the currently smallest autonomous racing drone in the world.

We are happy to announce that we are one of the 9 selected teams for the 2019 AlphaPilot Innovation Challenge!

TU Delft scientists have uncovered how deep neural networks see distances in a single image. They report on their findings in an article on the public Arxiv repository.
<description> Paper <description> Code cuSNN is available on GitHub via the following link: Github Page