
It sounds like science fiction, but also strangely familiar: drones buzzing around, inspecting tomatoes in greenhouses, delivering your package or inspecting an industrial site. With …
![]()
Micro Air Vehicle Lab – TUDelft
It sounds like science fiction, but also strangely familiar: drones buzzing around, inspecting tomatoes in greenhouses, delivering your package or inspecting an industrial site. With …

Our work on estimating attitude and angular rate with vision alone has been accepted for publication in Nature Portfolio Journals Robotics! It is part of …

🧠 Bridging the Gap Between Simulation and Reality Training drones to navigate complex environments autonomously is one of the central challenges in robotics. While simulators …

Design and Control of A Tilt-Rotor Tailsitter Aircraft with Pivoting VTOL Capability Content: In our newly accepted paper in IEEE Robotics and Automation Letters, we …
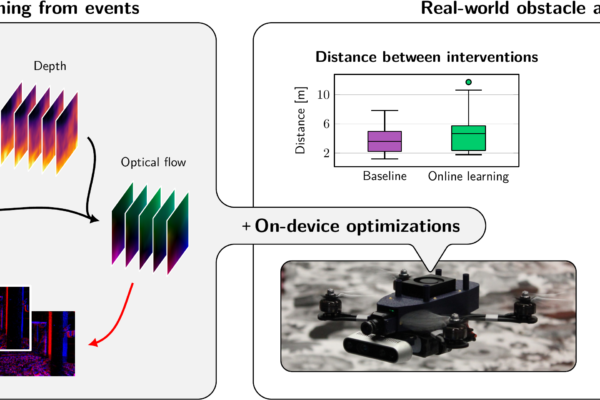
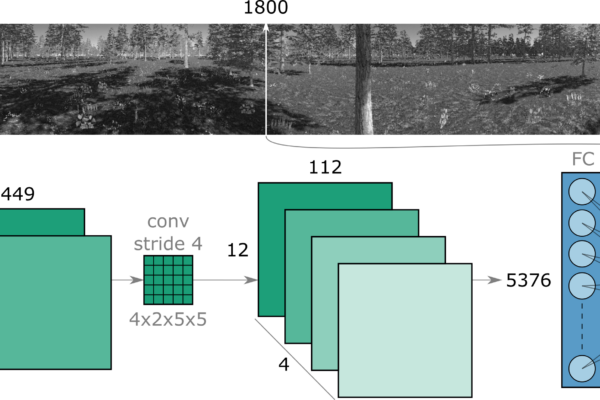
Our work on online, on-board learning of depth from events has been accepted at CVPR 2025. Event cameras provide low-latency perception for only milliwatts of …

We introduce a novel obstacle avoidance pipeline named Memory-Augmented Varying-speed Reinforcement Learning (MAVRL). MAVRL utilizes depth maps, along with the drone and target’s states as …

Inspired by how ants visually recognize their environment and count their steps to navigate back home, MAVLab researchers have developed an insect-inspired navigation strategy for …

In collaboration with ESA’s Advanced Concepts Team, we published our work on end-to-end guidance and control networks in the June 2024 issue of Science Robotics. …

Our work on fully neuromorphic vision and control for autonomous drone flight has been published in the Science Robotics May 2024 issue. In this work, …
Abstract Insects have long been recognized for their ability to navigate and return home using visual cues from their nest’s environment. However, the precise mechanism …