
We are very proud to officially announce that we have won the AlphaPilot Drone Racing Innovation challenge!
![]()
Micro Air Vehicle Lab – TUDelft
We are very proud to officially announce that we have won the AlphaPilot Drone Racing Innovation challenge!
Our latest paper in Science Robotics presents the first swarm of tiny robots that can explore unknown environments completely by themselves. No map, no memory, and no GPS!
researchers from TU Delft have developed a ‘pelican drone’: a drone capable of taking water samples quickly, in combination with a measuring instrument that immediately analyses the water quality.
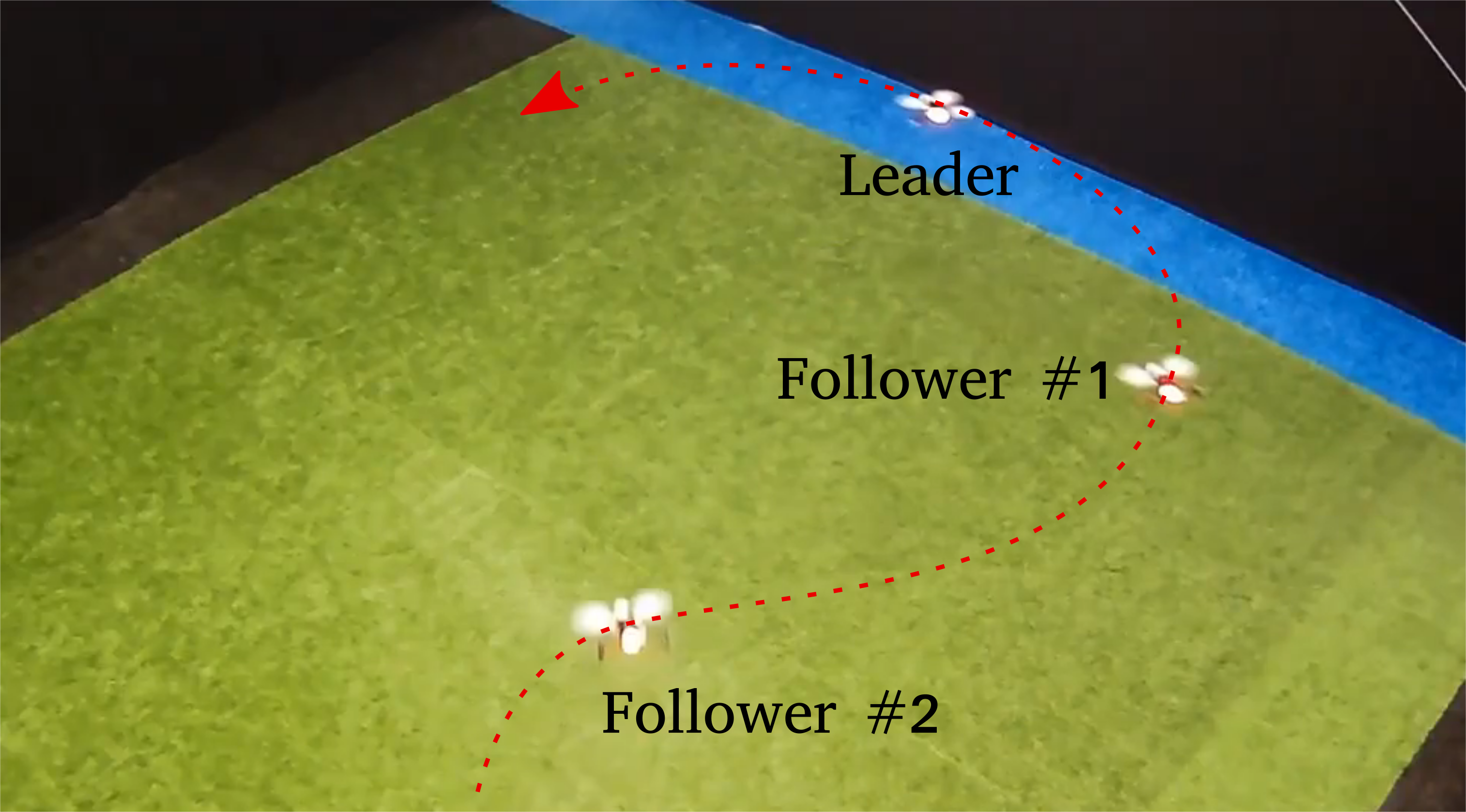
Teams of autonomous drones could be used in rescue missions, exploration, and more. How can we enable them to fly together safely? We are working …
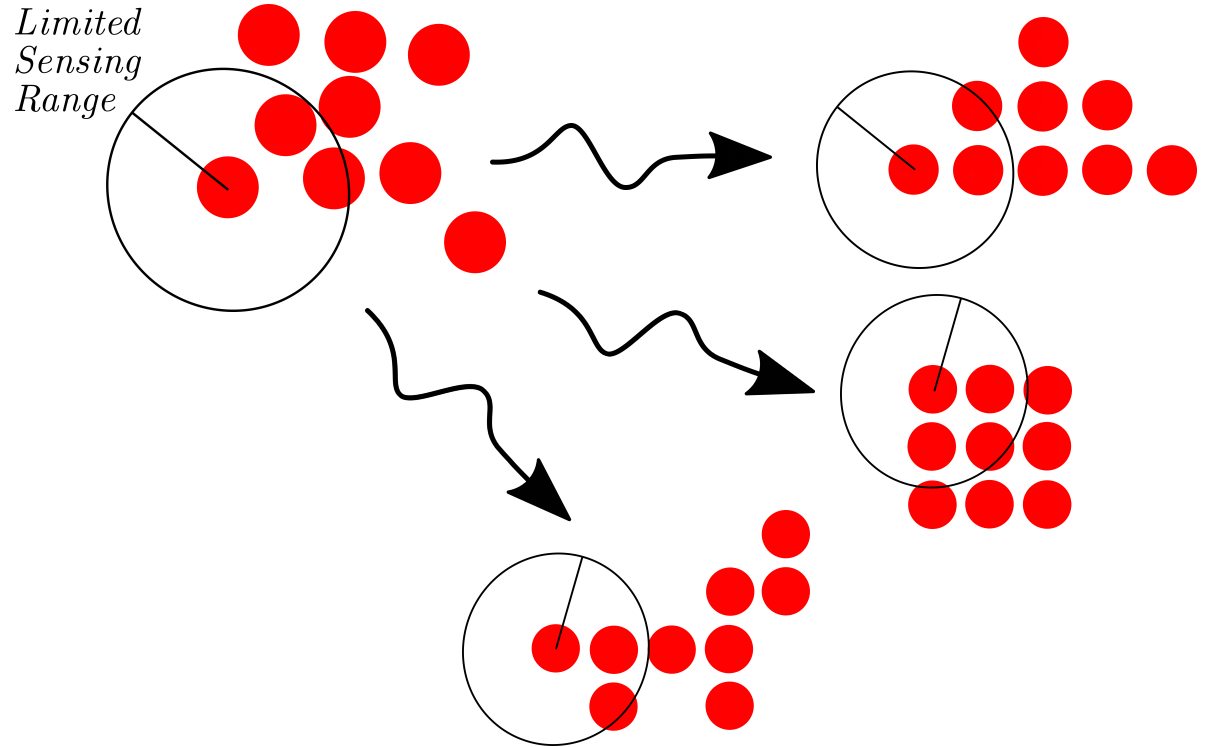
Small robots have limited perception and processing power. This is an inconvenient truth that we have to deal with. With swarm intelligence, however, we can …
Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take place in the beautiful Melbourne …

Besides dikes, the Netherlands are well known for its many lakes and rivers. It is difficult and labor intensive to properly monitor them all, even …
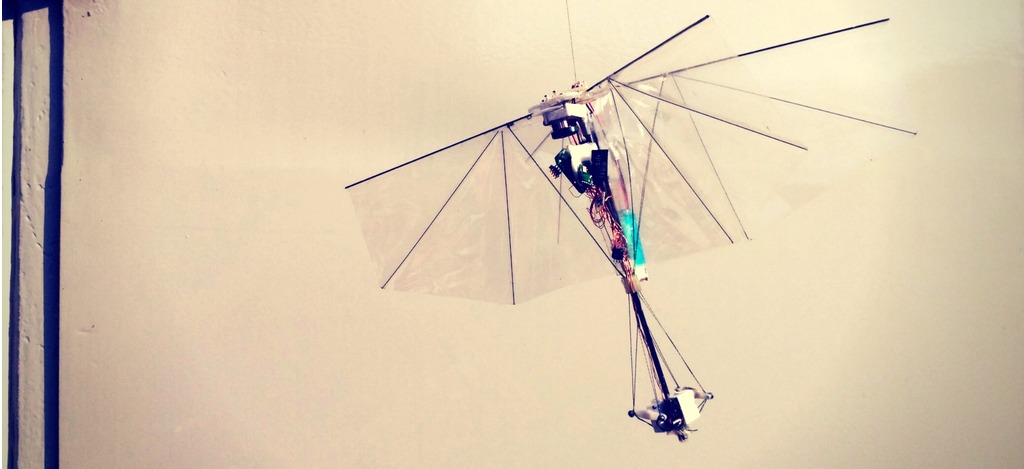
The DelFly Nimble, a new bio-inspired robot developed by MAVLab and employed for insect-flight research, is featured on the cover of the September 14 issue …
