
We are very proud to officially announce that we have won the AlphaPilot Drone Racing Innovation challenge!
![]()
Micro Air Vehicle Lab – TUDelft
We are very proud to officially announce that we have won the AlphaPilot Drone Racing Innovation challenge!
Our latest paper in Science Robotics presents the first swarm of tiny robots that can explore unknown environments completely by themselves. No map, no memory, and no GPS!

This database contains all the log files of the simulation and real world experiments of the publication: ‘Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment’ in Science robotics (2019).

Design and Testing of a Vertical take-off and Landing UAV optimized for carrying a Hydrogen Fuel-cell with Pressure Tank.

Fully autonomous drones safely made way for the high priority drones above TU Delft campus.

IMAV offers a unique mix of a competition and a conference. This year, we will take part in the indoor competition in a joint team with the start-up XOSight, as well as present 4 papers.
researchers from TU Delft have developed a ‘pelican drone’: a drone capable of taking water samples quickly, in combination with a measuring instrument that immediately analyses the water quality.
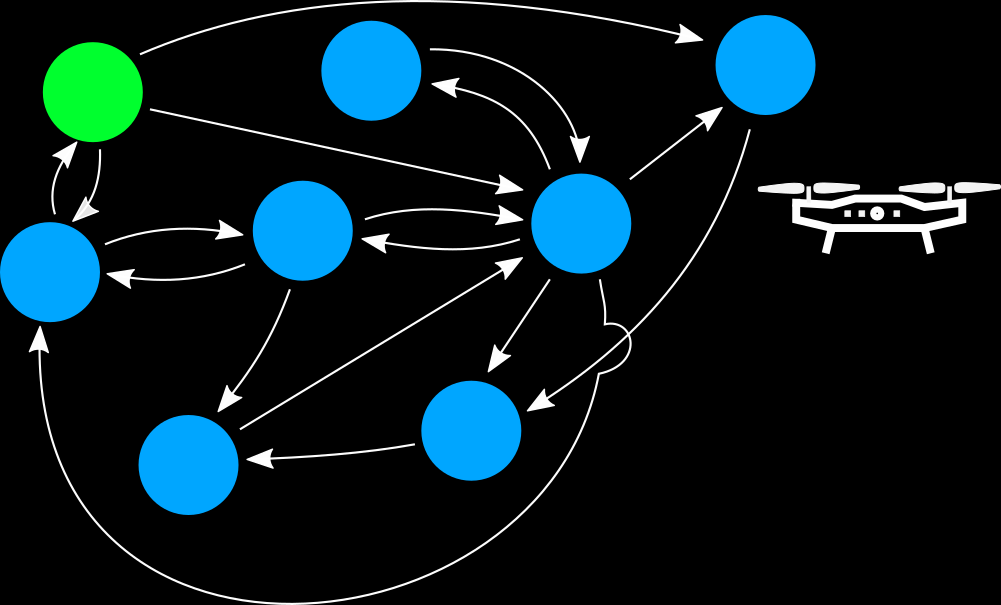
Our latest paper uses the Google PageRank algorithm to evaluate and optimize the behavior of swarms in a computationally efficient way, aimed at making swarms that are scalable, flexible, and robust.

The drone racing team of the MAVLab has presented the currently smallest autonomous racing drone in the world.

We are happy to announce that we are one of the 9 selected teams for the 2019 AlphaPilot Innovation Challenge!