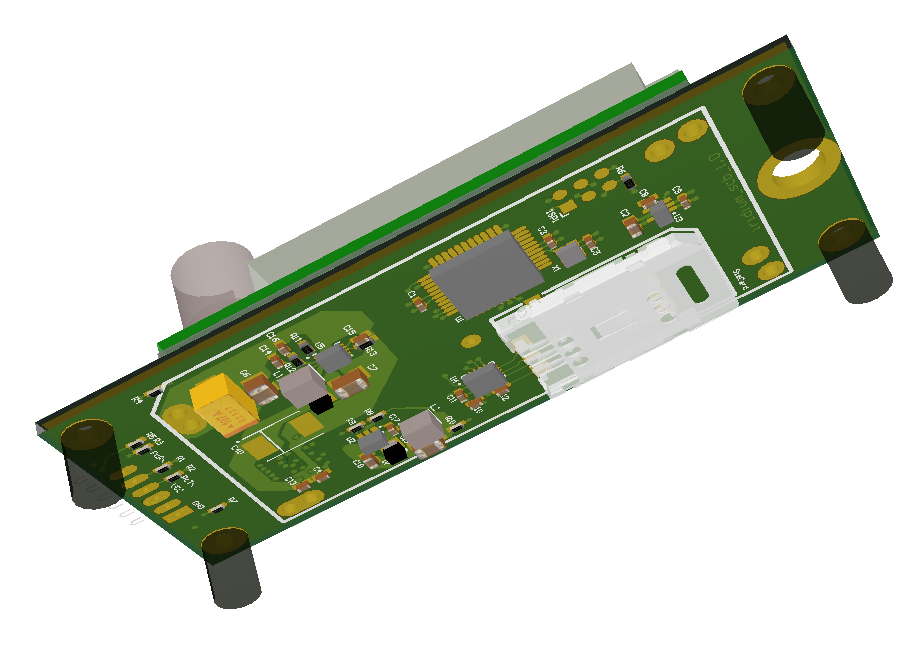
Iridium The MavLab released v1.0 of their Iridium Satellite Communication System. Overall it acts as a transparent link with serial communication at 9600 bps. Internally, …
![]()
Micro Air Vehicle Lab – TUDelft
Iridium The MavLab released v1.0 of their Iridium Satellite Communication System. Overall it acts as a transparent link with serial communication at 9600 bps. Internally, …
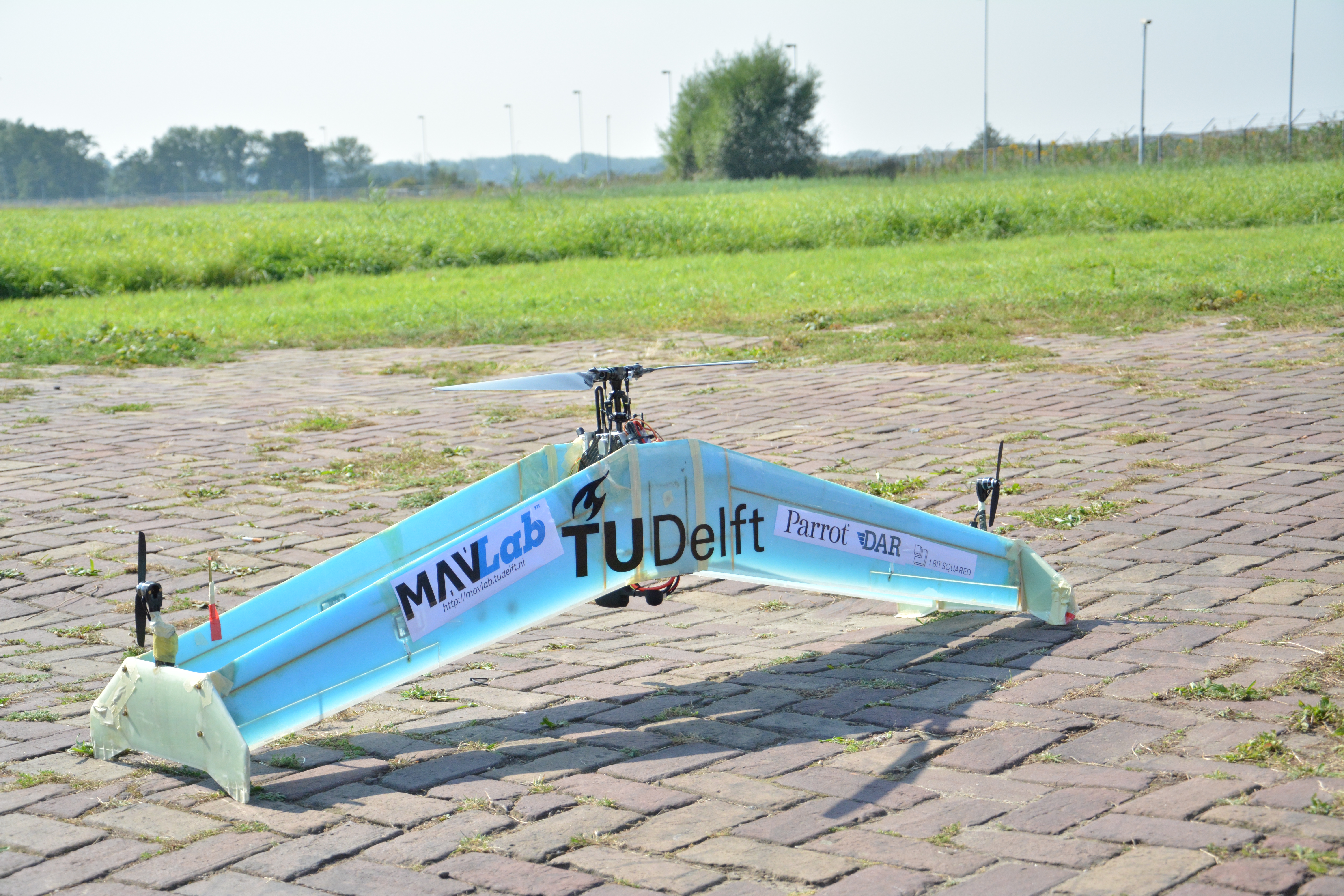
DELFTACOPTER is a hybrid electric UAV with exceptional efficiency both in hovering and fast forward flight. It is equipped with state of the art on-board stereoscopic …