Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take place in the beautiful Melbourne …
![]()
Micro Air Vehicle Lab – TUDelft
Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take place in the beautiful Melbourne …
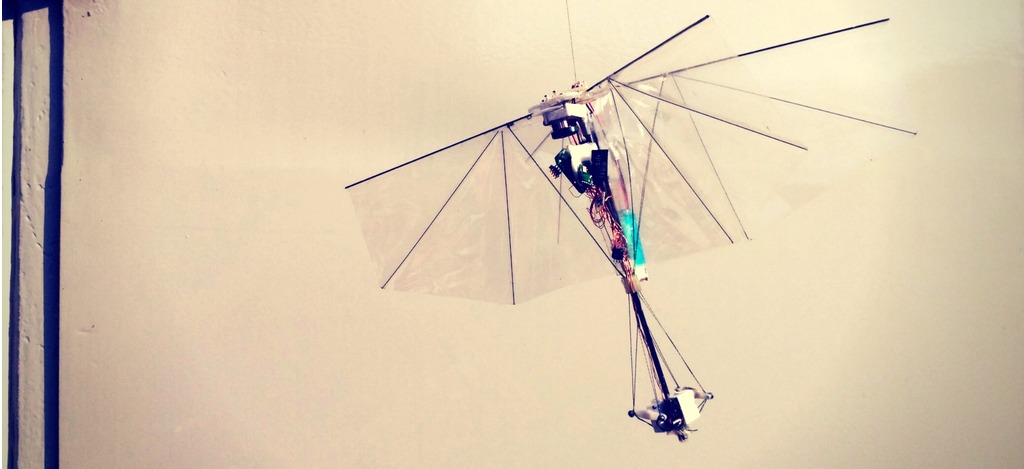
The DelFly Nimble, a new bio-inspired robot developed by MAVLab and employed for insect-flight research, is featured on the cover of the September 14 issue …

We are happy to introduce a new Ph.D. student. Diana Olejnik within the project: “Bio-inspired control and design of flapping wing MAVs”. Diana graduated from …