
In collaboration with ESA’s Advanced Concepts Team, we published our work on end-to-end guidance and control networks in the June 2024 issue of Science Robotics. …
![]()
Micro Air Vehicle Lab – TUDelft
In collaboration with ESA’s Advanced Concepts Team, we published our work on end-to-end guidance and control networks in the June 2024 issue of Science Robotics. …

Our work on fully neuromorphic vision and control for autonomous drone flight has been published in the Science Robotics May 2024 issue. In this work, …
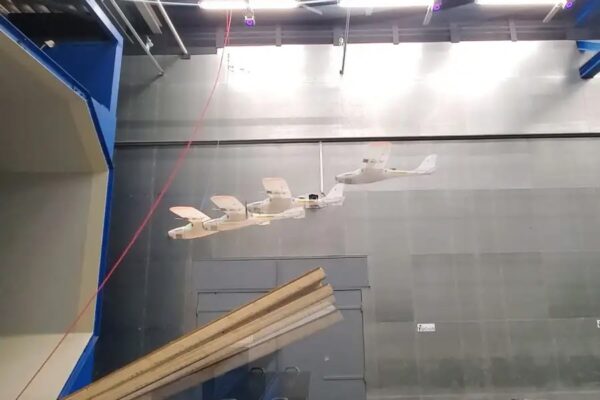
The work from PhD candidate Liming Zheng and Assistant Professor Salua Hamaza from the BioMorphic Intelligence Lab was published in the journal of IEEE Robotics and Automation …

With an escalating demand for quadcopters in emergency response, inspection and delivery, the need for speed and energy efficiency is paramount. However, developing autonomous systems …
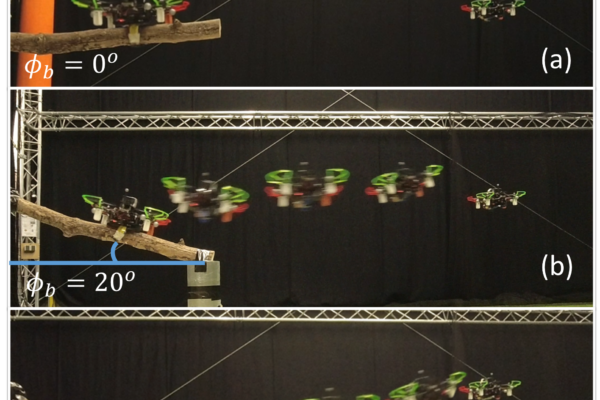
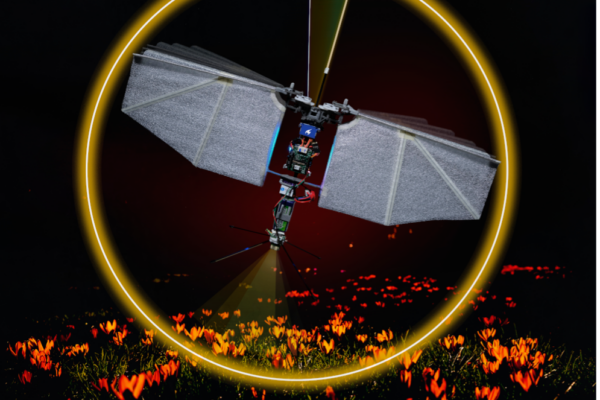
Birds display remarkable adaptability in harnessing their surroundings for efficient flight, exemplified by the ingenious behavior observed in Kestrels. These birds employ a unique technique …

In September, the MAVLab was at the International Micro Air Vehicle (IMAV) Conference and Competition in Aachen! The IMAV is a special competition, because it …

At ICRA (IEEE International Conference on Robotics and Automation) 2023, MAVLab presented AvoidBench, a high-fidelity vision-based obstacle avoidance benchmarking suite for multi-rotors. Motivation Vision-based obstacle …
Researchers from MAVLab and collaborators have developed a new theory on how flying drones and insects can estimate the gravity direction. Whereas drones typically use …
Salua and her team at the MAVLab and the Biomorphic Intelligence Lab have published 6 articles this month, 5 of which will be presented at IROS …

From September 12th to 16th, we hosted IMAV 2022 in the Netherlands for the second time. The whole event featured two days of scientific conference …