Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take place in the beautiful Melbourne …
![]()
Micro Air Vehicle Lab – TUDelft
Next week, the MAVLab will be off to the 10th International Micro Air Vehicle Competition and Conference, which will take place in the beautiful Melbourne …
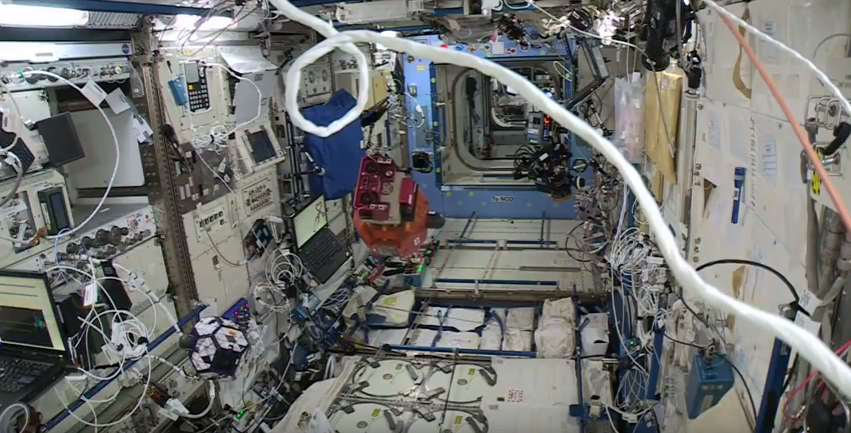
During an experiment performed on board of the International Space Station (ISS) a small drone successfully learned by itself to see distances using only one …
A new theory has been published that allows drones to see distances with a single camera. TU Delft’s Micro Air Vehicle Laboratory has found that …
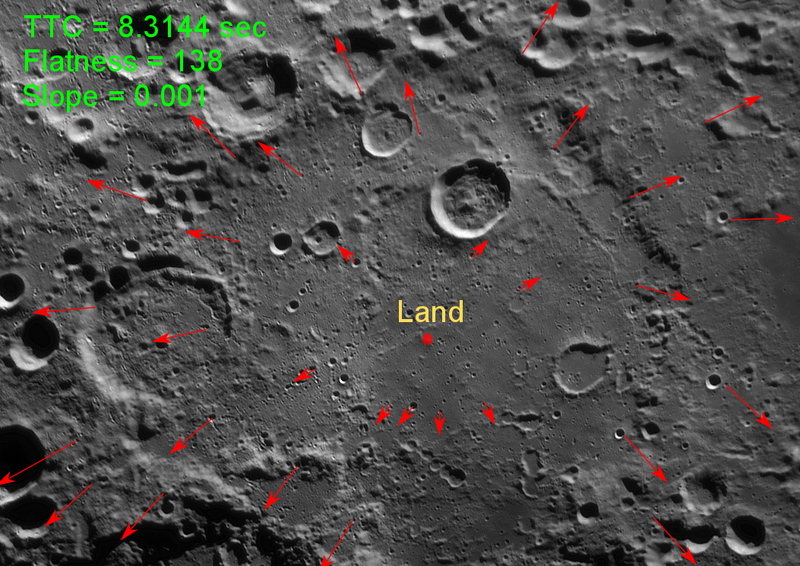
Background The capability of Unmanned Aerial Vehicles (UAVs) to perform landing task is essential for the autonomous operation, especially when they are outside line-of-sight. For autonomous landing, these …