Federico Paredes-Vallés, Kirk W. Y. Scheper, Christophe De Wagter, Guido C. H. E. de Croon
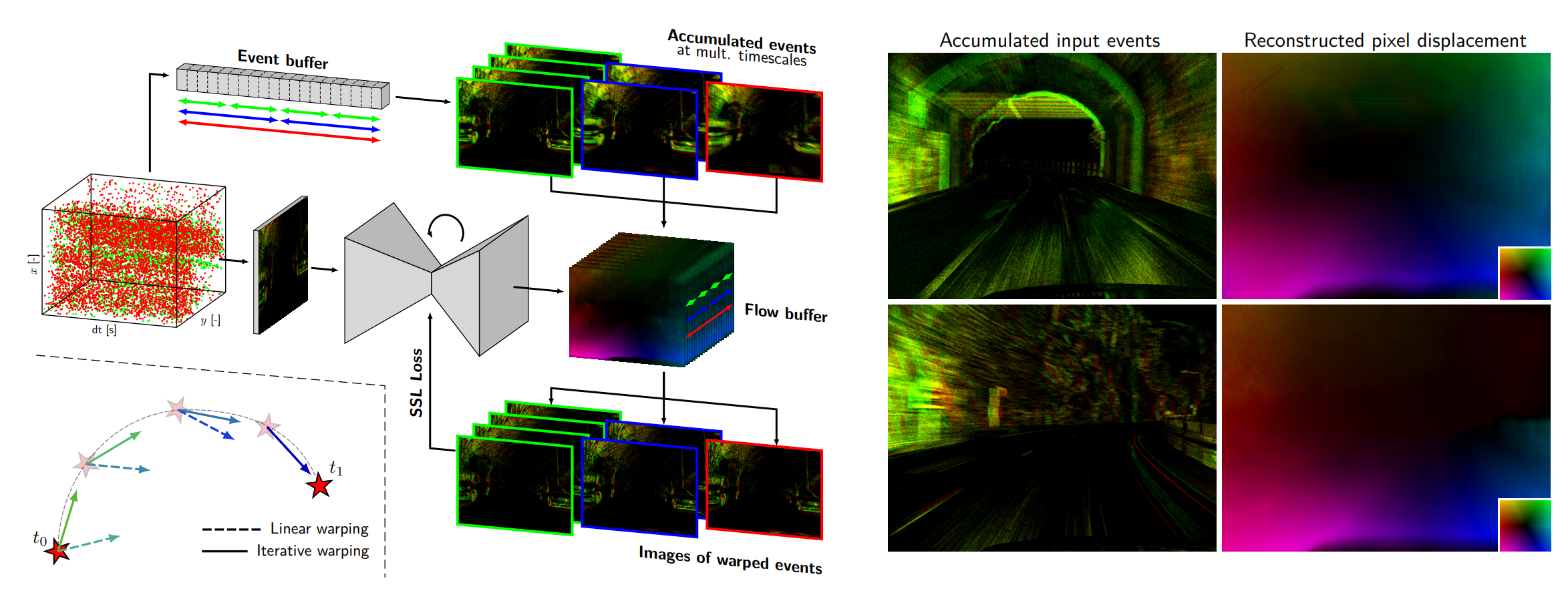
Event cameras have recently gained significant traction since they open up new avenues for low-latency and low-power solutions to complex computer vision problems. To unlock these solutions, it is necessary to develop algorithms that can leverage the unique nature of event data. However, the current state-of-the-art is still highly influenced by the frame-based literature, and usually fails to deliver on these promises. In this work, we take this into consideration and propose a novel self-supervised learning pipeline for the sequential estimation of event-based optical flow that allows for the scaling of the models to high inference frequencies. At its core, we have a continuously-running stateful neural model that is trained using a novel formulation of contrast maximization that makes it robust to nonlinearities and varying statistics in the input events. Results across multiple datasets confirm the effectiveness of our method, which establishes a new state of the art in terms of accuracy for approaches trained or optimized without ground truth.