2019
|
Journal Articles
|
Matěj Karásek; Mustafa Percin; Torbjørn Cunis; Bas W. Oudheusden; Christophe De Wagter; Bart D. W. Remes; Guido C. H. E. Croon Accurate position control of a flapping-wing robot enabling free-flight flow visualisation in a wind tunnel (Journal Article) In: International Journal of Micro Air Vehicles, vol. 11, 2019, ISSN: 1756-8293. @article{f3ffc69e27334e15b7f881517ef73117,
title = {Accurate position control of a flapping-wing robot enabling free-flight flow visualisation in a wind tunnel},
author = {Matěj Karásek and Mustafa Percin and Torbjørn Cunis and Bas W. Oudheusden and Christophe De Wagter and Bart D. W. Remes and Guido C. H. E. Croon},
url = {https://research.tudelft.nl/en/publications/accurate-position-control-of-a-flapping-wing-robot-enabling-free-},
doi = {10.1177/1756829319833683},
issn = {1756-8293},
year = {2019},
date = {2019-01-01},
journal = {International Journal of Micro Air Vehicles},
volume = {11},
publisher = {Multi-Science Publishing Co. Ltd},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Conferences
|
Florian T. Muijres; Matej Karasek; Christophe Wagter; Bart Remes; Guido Croon A Bio-inspired Free-flying Robot Reveals that Flies Use Torque Coupling in Rapid Banked Turns (Conference) 2019, (SICB Annual Meeting 2019 ; Conference date: 03-01-2019 Through 07-01-2019). @conference{56a1039fd7494063afebf73be3248787,
title = {A Bio-inspired Free-flying Robot Reveals that Flies Use Torque Coupling in Rapid Banked Turns},
author = {Florian T. Muijres and Matej Karasek and Christophe Wagter and Bart Remes and Guido Croon},
url = {https://research.tudelft.nl/en/publications/a-bio-inspired-free-flying-robot-reveals-that-flies-use-torque-co},
doi = {10.1093/icb/icz003},
year = {2019},
date = {2019-01-01},
pages = {E164–E164},
note = {SICB Annual Meeting 2019 ; Conference date: 03-01-2019 Through 07-01-2019},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
|
data
|
Kimberly McGuire Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment (data) 2019. @data{10.34894/3t5ms9,
title = {Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment},
author = {Kimberly McGuire},
url = {https://dataverse.nl/citation?persistentId=doi:10.34894/3T5MS9},
doi = {10.34894/3T5MS9},
year = {2019},
date = {2019-01-01},
publisher = {DataverseNL},
keywords = {},
pubstate = {published},
tppubtype = {data}
}
|
Karl Martin Kajak; Matej Karasek; Quiping Chu; Guido De Croon A minimal longitudinal dynamic model of a tailless flapping wing robot for control design (dataset) (data) 2019. @data{10.34894/hof4nu,
title = {A minimal longitudinal dynamic model of a tailless flapping wing robot for control design (dataset)},
author = {Karl Martin Kajak and Matej Karasek and Quiping Chu and Guido De Croon},
url = {https://dataverse.nl/citation?persistentId=doi:10.34894/HOF4NU},
doi = {10.34894/HOF4NU},
year = {2019},
date = {2019-01-01},
publisher = {DataverseNL},
keywords = {},
pubstate = {published},
tppubtype = {data}
}
|
Proceedings Articles
|
Tom Dijk; Guido Croon How Do Neural Networks See Depth in Single Images? (Proceedings Article) In: Proceedings - 2019 International Conference on Computer Vision, ICCV 2019, pp. 2183–2191, 2019, (The IEEE International Conference on Computer Vision 2019, ICCV ; Conference date: 27-10-2019 Through 02-11-2019). @inproceedings{fbe6b0d4cd10450197da2e6f77f7f4cd,
title = {How Do Neural Networks See Depth in Single Images?},
author = {Tom Dijk and Guido Croon},
url = {https://research.tudelft.nl/en/publications/how-do-neural-networks-see-depth-in-single-images},
doi = {10.1109/ICCV.2019.00227},
year = {2019},
date = {2019-10-01},
booktitle = {Proceedings - 2019 International Conference on Computer Vision, ICCV 2019},
pages = {2183–2191},
series = {Proceedings of the IEEE International Conference on Computer Vision},
note = {The IEEE International Conference on Computer Vision 2019, ICCV ; Conference date: 27-10-2019 Through 02-11-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Diana A Olejnik; Bas P Duisterhof; Matej Kar á; Kirk Y W Scheper; Tom van Dijk; Guido C H E de Croon A Tailless Flapping Wing MAV Performing Monocular Visual Servoing Tasks (Proceedings Article) In: Campoy, P (Ed.): 11th International Micro Air Vehicle Competition and Conference, pp. 60–66, Madrid, Spain, 2019. @inproceedings{imav2019:d_olejnik_et_al,
title = {A Tailless Flapping Wing MAV Performing Monocular Visual Servoing Tasks},
author = {Diana A Olejnik and Bas P Duisterhof and Matej Kar á and Kirk Y W Scheper and Tom van Dijk and Guido C H E de Croon},
editor = {P Campoy},
year = {2019},
date = {2019-09-29},
booktitle = {11th International Micro Air Vehicle Competition and Conference},
pages = {60--66},
address = {Madrid, Spain},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Hector Garcia De Marina; Ewoud Smeur Flexible collaborative transportation by a team of rotorcraft (Proceedings Article) In: 2019 International Conference on Robotics and Automation, ICRA 2019, pp. 1074–1080, Institute of Electrical and Electronics Engineers (IEEE), United States, 2019, (2019 International Conference on Robotics and Automation, ICRA 2019 ; Conference date: 20-05-2019 Through 24-05-2019). @inproceedings{fe27bd93c73d44b3ab5ad3fa69074816,
title = {Flexible collaborative transportation by a team of rotorcraft},
author = {Hector Garcia De Marina and Ewoud Smeur},
url = {https://research.tudelft.nl/en/publications/flexible-collaborative-transportation-by-a-team-of-rotorcraft},
doi = {10.1109/ICRA.2019.8794316},
year = {2019},
date = {2019-05-01},
booktitle = {2019 International Conference on Robotics and Automation, ICRA 2019},
volume = {2019-May},
pages = {1074–1080},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
address = {United States},
note = {2019 International Conference on Robotics and Automation, ICRA 2019 ; Conference date: 20-05-2019 Through 24-05-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Diana Olejnik; Matej Karasek; Bart Duisterhof; Kirk Scheper; Tom Dijk; Guido Croon A Tailless Flapping Wing MAV Performing Monocular Visual Servoing Tasks (Proceedings Article) In: Campoy, P. (Ed.): International Micro Air Vehicle Competition and Conference, pp. 60–66, 2019, (International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019). @inproceedings{9e60942988e14049bdf37a95c7464e5f,
title = {A Tailless Flapping Wing MAV Performing Monocular Visual Servoing Tasks},
author = {Diana Olejnik and Matej Karasek and Bart Duisterhof and Kirk Scheper and Tom Dijk and Guido Croon},
editor = {P. Campoy},
url = {https://research.tudelft.nl/en/publications/a-tailless-flapping-wing-mav-performing-monocular-visual-servoing-2},
year = {2019},
date = {2019-01-01},
booktitle = {International Micro Air Vehicle Competition and Conference},
pages = {60–66},
note = {International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Borrdephong Rattanagraikanakorn; Michiel Schuurman; Derek Gransden; Riender Happee; Christophe Wagter; Alexei Sharpanskykh; Henk Blom Modelling head injury due to unmanned aircraft systems collision: Crash dummy vs human body (Proceedings Article) In: AIAA Aviation 2019 Forum, American Institute of Aeronautics and Astronautics Inc. (AIAA), United States, 2019, (Green Open Access added to TU Delft Institutional Repository ‘You share, we take care!’ – Taverne project https://www.openaccess.nl/en/you-share-we-take-care Otherwise as indicated in the copyright section: the publisher is the copyright holder of this work and the author uses the Dutch legislation to make this work public.; AIAA Aviation 2019 Forum ; Conference date: 17-06-2019 Through 21-06-2019). @inproceedings{399345b251164d7c87ce547c36ec871f,
title = {Modelling head injury due to unmanned aircraft systems collision: Crash dummy vs human body},
author = {Borrdephong Rattanagraikanakorn and Michiel Schuurman and Derek Gransden and Riender Happee and Christophe Wagter and Alexei Sharpanskykh and Henk Blom},
url = {https://research.tudelft.nl/en/publications/modelling-head-injury-due-to-unmanned-aircraft-systems-collision-},
doi = {10.2514/6.2019-2835},
year = {2019},
date = {2019-01-01},
booktitle = {AIAA Aviation 2019 Forum},
publisher = {American Institute of Aeronautics and Astronautics Inc. (AIAA)},
address = {United States},
series = {AIAA Aviation 2019 Forum},
note = {Green Open Access added to TU Delft Institutional Repository ‘You share, we take care!’ – Taverne project https://www.openaccess.nl/en/you-share-we-take-care Otherwise as indicated in the copyright section: the publisher is the copyright holder of this work and the author uses the Dutch legislation to make this work public.; AIAA Aviation 2019 Forum ; Conference date: 17-06-2019 Through 21-06-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Borrdephong Rattanagraikanakorn; Michiel Schuurman; Derek Gransden; Riender Happee; Christophe De Wagter; Alexei Sharpanskykh; Henk Blom Modelling Head Injury due to Unmanned Aircraft Systems Collision: Crash Dummy vs Human Body (Proceedings Article) In: 2019 AIAA Aviation and Aeronautics Forum and Exposition, AIAA, 2019. @inproceedings{cdw_2019_aiaa_forum,
title = {Modelling Head Injury due to Unmanned Aircraft Systems Collision: Crash Dummy vs Human Body},
author = {Borrdephong Rattanagraikanakorn and Michiel Schuurman and Derek Gransden and Riender Happee and Christophe {De Wagter} and Alexei Sharpanskykh and Henk Blom},
doi = {10.2514/6.2019-2835},
year = {2019},
date = {2019-01-01},
booktitle = {2019 AIAA Aviation and Aeronautics Forum and Exposition},
publisher = {AIAA},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Dorian Heitzig; Bas Oudheusden; Diana Olejnik; Matej Karasek Effects of asymmetrical inflow in forward flight on the deformation of interacting flapping wings (Proceedings Article) In: International Micro Air Vehicle Competition and Conference, 2019, (International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019). @inproceedings{237b3aa70990472ba1647ec315d97fa7,
title = {Effects of asymmetrical inflow in forward flight on the deformation of interacting flapping wings},
author = {Dorian Heitzig and Bas Oudheusden and Diana Olejnik and Matej Karasek},
url = {https://research.tudelft.nl/en/publications/effects-of-asymmetrical-inflow-in-forward-flight-on-the-deformati},
year = {2019},
date = {2019-01-01},
booktitle = {International Micro Air Vehicle Competition and Conference},
note = {International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Dirk Wijnker; Tom Dijk; M. Snellen; Guido Croon; Christophe Wagter Hear-and-avoid for UAVs using convolutional neural networks (Proceedings Article) In: International Micro Air Vehicle Competition and Conference, pp. 144–156, 2019, (International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019). @inproceedings{29228cd9cc7148469b6e62f8ce2efa12,
title = {Hear-and-avoid for UAVs using convolutional neural networks},
author = {Dirk Wijnker and Tom Dijk and M. Snellen and Guido Croon and Christophe Wagter},
url = {https://research.tudelft.nl/en/publications/hear-and-avoid-for-uavs-using-convolutional-neural-networks},
year = {2019},
date = {2019-01-01},
booktitle = {International Micro Air Vehicle Competition and Conference},
pages = {144–156},
note = {International Micro Air Vehicle Competition and Conference 2019, IMAV 2019 ; Conference date: 30-09-2019 Through 04-10-2019},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
Masters Theses
|
Alex Lyrakis Low-cost stereo-based obstacle avoidance for small UAVs using uncertainty maps (Masters Thesis) TU Delft Electrical Engineering, Mathematics and Computer Science, 2019, (van Dijk, Tom (mentor); de Croon, G.C.H.E. (mentor); Wong, J.S.S.M. (mentor); Verhoeven, C.J.M. (graduation committee); van Genderen, A.J. (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:96a87f24-c9b1-4a3e-99df-09dc27772609,
title = {Low-cost stereo-based obstacle avoidance for small UAVs using uncertainty maps},
author = {Alex Lyrakis},
url = {http://resolver.tudelft.nl/uuid:96a87f24-c9b1-4a3e-99df-09dc27772609},
year = {2019},
date = {2019-01-01},
school = {TU Delft Electrical Engineering, Mathematics and Computer Science},
abstract = {The last years there is a wide interest in UAVs which can be attributed to their low cost and wide range of use in recreational, commercial and scientific applications. Despite the large increase in drones, UAV flights are permitted only in secluded areas. In order to be granted access to public areas, it must prove its capacity to sense and safely avoid collisions with other obstacles. Therefore, the need for a secure and reliable CAS is imperative. In this thesis a<br/>low-cost, low computationally demanding, stereo-based, robust CAS solution for small UAVs is designed, assuming flights primarily in an outdoor environment. In order to address this problem, firstly the existing dense stereo open-source algorithms are reviewed based on their suitability for obstacle avoidance and their computational complexity. Based on a semantic evaluation and profiling, the review concludes that BM should be preferred for low-cost obstacle avoidance and SGBM should be used only in highly textureless environments. Subsequently, since the imperfect accuracy of any existing stereo solution is a fact, a machine learning method is introduced in order to predict the uncertainty of the stereo measurements. This so called “uncertainty map” method assigns an uncertainty value to every image pixel. It was shown that it can successfully predict the uncertainties of BM and SGBM stereo algorithms. Furthermore, a low-cost collision avoidance method was proposed which makes use of uncertainty map in sensing filtering, collision detection and path planning. The evaluation showed that the use of uncertainty map improves<br/>both collision detection and path planning, especially when BM is used. Last but not least, the whole CAS was implemented in an embedded system Raspberry Pi 3 model B+. Results show that real-time execution of the propsoed CAS with a runtime frequency of 4-54 Hz is possible when BM is used and 1-16 Hz when SGBM is used.},
note = {van Dijk, Tom (mentor); de Croon, G.C.H.E. (mentor); Wong, J.S.S.M. (mentor); Verhoeven, C.J.M. (graduation committee); van Genderen, A.J. (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
The last years there is a wide interest in UAVs which can be attributed to their low cost and wide range of use in recreational, commercial and scientific applications. Despite the large increase in drones, UAV flights are permitted only in secluded areas. In order to be granted access to public areas, it must prove its capacity to sense and safely avoid collisions with other obstacles. Therefore, the need for a secure and reliable CAS is imperative. In this thesis a<br/>low-cost, low computationally demanding, stereo-based, robust CAS solution for small UAVs is designed, assuming flights primarily in an outdoor environment. In order to address this problem, firstly the existing dense stereo open-source algorithms are reviewed based on their suitability for obstacle avoidance and their computational complexity. Based on a semantic evaluation and profiling, the review concludes that BM should be preferred for low-cost obstacle avoidance and SGBM should be used only in highly textureless environments. Subsequently, since the imperfect accuracy of any existing stereo solution is a fact, a machine learning method is introduced in order to predict the uncertainty of the stereo measurements. This so called “uncertainty map” method assigns an uncertainty value to every image pixel. It was shown that it can successfully predict the uncertainties of BM and SGBM stereo algorithms. Furthermore, a low-cost collision avoidance method was proposed which makes use of uncertainty map in sensing filtering, collision detection and path planning. The evaluation showed that the use of uncertainty map improves<br/>both collision detection and path planning, especially when BM is used. Last but not least, the whole CAS was implemented in an embedded system Raspberry Pi 3 model B+. Results show that real-time execution of the propsoed CAS with a runtime frequency of 4-54 Hz is possible when BM is used and 1-16 Hz when SGBM is used. |
Stein Stroobants On-board Micro Quadrotor State Estimation Using Range Measurements: A Moving Horizon Approach (Masters Thesis) TU Delft Mechanical, Maritime and Materials Engineering, 2019, (Keviczky, Tamas (mentor); de Croon, Guido (graduation committee); Li, Shushuai (graduation committee); de Wagter, Christophe (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:c4170bbd-059d-4874-82f9-958bec2c668e,
title = {On-board Micro Quadrotor State Estimation Using Range Measurements: A Moving Horizon Approach},
author = {Stein Stroobants},
url = {http://resolver.tudelft.nl/uuid:c4170bbd-059d-4874-82f9-958bec2c668e},
year = {2019},
date = {2019-01-01},
school = {TU Delft Mechanical, Maritime and Materials Engineering},
abstract = {Accurate indoor localization is essential for autonomous robotic agents to perform tasks ranging from warehouse management to remote sensing in greenhouses. Recently Ultra Wideband (UWB) distance measurements have been used to estimate position and velocity indoors. These UWB-measurements are known to be corrupted by a varying bias. Besides, current estimation methods are not suitable for large areas with a low beacon coverage. The goal<br/>of this thesis was therefore twofold. First, a simple bias model was proposed to reduce the influence of the UWB bias while still being implementable on a micro-processor. This model was shown to reduce the measurement error with 50% on validation data. Using this model, UWB-localization in a static beacon-configuration can be quickly improved. Second, an adaptation of the standard Moving Horizon Estimation (MHE) method was proposed that uses a time-window of range measurements to increase the robustness to outliers and is still real-time implementable on a micro-processor. This Moving Horizon Model Parametrization (MH-MP) does not estimate every state in the complete time-window, but only estimates an offset of the initial state in the window. An analysis of simulation data and data gathered in flight has shown that the proposed MH-MP outperforms the Extended Kalman Filter (EKF) in both the<br/>position and velocity estimate and has a comparable computation time. Further research is necessary to investigate the possibility of estimating the UWB-bias model parameters online.},
note = {Keviczky, Tamas (mentor); de Croon, Guido (graduation committee); Li, Shushuai (graduation committee); de Wagter, Christophe (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Accurate indoor localization is essential for autonomous robotic agents to perform tasks ranging from warehouse management to remote sensing in greenhouses. Recently Ultra Wideband (UWB) distance measurements have been used to estimate position and velocity indoors. These UWB-measurements are known to be corrupted by a varying bias. Besides, current estimation methods are not suitable for large areas with a low beacon coverage. The goal<br/>of this thesis was therefore twofold. First, a simple bias model was proposed to reduce the influence of the UWB bias while still being implementable on a micro-processor. This model was shown to reduce the measurement error with 50% on validation data. Using this model, UWB-localization in a static beacon-configuration can be quickly improved. Second, an adaptation of the standard Moving Horizon Estimation (MHE) method was proposed that uses a time-window of range measurements to increase the robustness to outliers and is still real-time implementable on a micro-processor. This Moving Horizon Model Parametrization (MH-MP) does not estimate every state in the complete time-window, but only estimates an offset of the initial state in the window. An analysis of simulation data and data gathered in flight has shown that the proposed MH-MP outperforms the Extended Kalman Filter (EKF) in both the<br/>position and velocity estimate and has a comparable computation time. Further research is necessary to investigate the possibility of estimating the UWB-bias model parameters online. |
Jiahao Lin Real-time Vision-based Autonomous Navigation of MAV in Dynamic Environments (Masters Thesis) TU Delft Mechanical, Maritime and Materials Engineering; TU Delft Cognitive Robotics, 2019, (de Croon, Guido (mentor); Alonso Mora, Javier (mentor); Ferrari, Riccardo M.G. (graduation committee); Zhu, Hai (mentor); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:91f200f7-4966-4504-bc83-5a87e5550a91,
title = {Real-time Vision-based Autonomous Navigation of MAV in Dynamic Environments},
author = {Jiahao Lin},
url = {http://resolver.tudelft.nl/uuid:91f200f7-4966-4504-bc83-5a87e5550a91},
year = {2019},
date = {2019-01-01},
school = {TU Delft Mechanical, Maritime and Materials Engineering; TU Delft Cognitive Robotics},
abstract = {Safe navigation in unknown environments is a challenging task for autonomous Micro Aerial Vehicle (MAV) systems. Previous works generally avoid obstacles by assuming that the environment is static. The purpose of this thesis work is to develop a MAV system that can navigate autonomously and safely in dynamic environments. We present an onboard vision-based approach for the avoidance of moving obstacles in dynamic environments. This approach uses a state-of-art visual odometry algorithm to estimate the pose of MAV and an efficient obstacle sensing method based on stereo image pairs to estimate the center position, velocity, and size of the obstacles. Considering the uncertainties of the estimations, a chance-constrained Model Predictive Controller (MPC) is applied to achieve robust collision avoidance. The method takes into account the MAV’s dynamics, state estimation and the obstacle sensing results ensuring that the collision probability between the MAV and each obstacle is below a specified threshold. The proposed approach is implemented on a designed experimental platform that consists of a quadrotor, a depth camera, and a single-board computer, and is successfully tested in a variety of environments, showing effective online collision avoidance of moving obstacles.},
note = {de Croon, Guido (mentor); Alonso Mora, Javier (mentor); Ferrari, Riccardo M.G. (graduation committee); Zhu, Hai (mentor); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Safe navigation in unknown environments is a challenging task for autonomous Micro Aerial Vehicle (MAV) systems. Previous works generally avoid obstacles by assuming that the environment is static. The purpose of this thesis work is to develop a MAV system that can navigate autonomously and safely in dynamic environments. We present an onboard vision-based approach for the avoidance of moving obstacles in dynamic environments. This approach uses a state-of-art visual odometry algorithm to estimate the pose of MAV and an efficient obstacle sensing method based on stereo image pairs to estimate the center position, velocity, and size of the obstacles. Considering the uncertainties of the estimations, a chance-constrained Model Predictive Controller (MPC) is applied to achieve robust collision avoidance. The method takes into account the MAV’s dynamics, state estimation and the obstacle sensing results ensuring that the collision probability between the MAV and each obstacle is below a specified threshold. The proposed approach is implemented on a designed experimental platform that consists of a quadrotor, a depth camera, and a single-board computer, and is successfully tested in a variety of environments, showing effective online collision avoidance of moving obstacles. |
Nilay Sheth State Estimation and Optimal Control for Racing Drones: In search of control algorithms for competing against human pilots (Masters Thesis) TU Delft Electrical Engineering, Mathematics and Computer Science, 2019, (de Croon, Guido (mentor); de Wagter, Christophe (mentor); Langendoen, Koen (mentor); Zuñiga Zamalloa, Marco (mentor); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:99f41ef5-f2c9-4a0a-9b89-0245e106f6de,
title = {State Estimation and Optimal Control for Racing Drones: In search of control algorithms for competing against human pilots},
author = {Nilay Sheth},
url = {http://resolver.tudelft.nl/uuid:99f41ef5-f2c9-4a0a-9b89-0245e106f6de},
year = {2019},
date = {2019-01-01},
school = {TU Delft Electrical Engineering, Mathematics and Computer Science},
abstract = {The e-sport of drone-racing involves human pilots to race against time. Recently, drone races have also gone fully-autonomous. As a result, these agile robotic platforms not only pose challenges of flying fast to the participating pilots but also create challenges for the flight control computers. As a result, the concept of autonomous drone racing has gained significant attention from research groups around the world. These races aim to push the boundaries of perception and control algorithms, while simultaneously mitigating the real-world uncertainty of execution on autonomous systems. While perception algorithms face challenges due to limited feature detection, high motion blur and computational requirements, control algorithms face challenges of convergence to the desired trajectories that are planned out in the race arena. <br/>This thesis addresses the challenge of control for racing, which is responsible for guiding the drone to design and track desired trajectories for fast flights. The control sub-modules of racing drones are responsible for generating trajectories for fastest possible flights and also for obeying these generated commands. Additionally, the requirement of limited algorithm complexity is added to match the philosophy of computationally efficient algorithms at the Micro Air Vehicle Laboratory. However, to address the requirements of these control sub-modules, the prerequisite of accurate state estimation always persists. Assigning control actions to a robot without information on the current state of the robot is rather unwise. As a result, this thesis first aims to perform accurate state estimation before designing controllers for time-optimal trajectory tracking. Again, another constraint of using only a single sensor (i.e. the Inertial Measurement Unit) is added to make the drone race in GPS denied environments. As a result, the goal of the thesis is two-fold i.e. making accurate state estimators while using limited sensors and designing optimal controllers for taking the quickest trajectory through the arena. To achieve the goal of accurate state estimation, existing techniques are studied. Several features from each of these methods are selected to design a new estimator. To achieve the goal of time-optimal trajectory generation, firstly, the flaws of traditional control methods are pointed out. A new optimal-control technique is proposed, which makes use of fundamental principles dating back several decades. This principle is then fused along with present-day optimization solvers. Finally, the proposed state estimation and control algorithm are compared against prior (benchmarked) techniques in the area. Compared to existing optimal control techniques, the proposed algorithm leads to faster trajectories and consumes less computational power onboard.},
note = {de Croon, Guido (mentor); de Wagter, Christophe (mentor); Langendoen, Koen (mentor); Zuñiga Zamalloa, Marco (mentor); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
The e-sport of drone-racing involves human pilots to race against time. Recently, drone races have also gone fully-autonomous. As a result, these agile robotic platforms not only pose challenges of flying fast to the participating pilots but also create challenges for the flight control computers. As a result, the concept of autonomous drone racing has gained significant attention from research groups around the world. These races aim to push the boundaries of perception and control algorithms, while simultaneously mitigating the real-world uncertainty of execution on autonomous systems. While perception algorithms face challenges due to limited feature detection, high motion blur and computational requirements, control algorithms face challenges of convergence to the desired trajectories that are planned out in the race arena. <br/>This thesis addresses the challenge of control for racing, which is responsible for guiding the drone to design and track desired trajectories for fast flights. The control sub-modules of racing drones are responsible for generating trajectories for fastest possible flights and also for obeying these generated commands. Additionally, the requirement of limited algorithm complexity is added to match the philosophy of computationally efficient algorithms at the Micro Air Vehicle Laboratory. However, to address the requirements of these control sub-modules, the prerequisite of accurate state estimation always persists. Assigning control actions to a robot without information on the current state of the robot is rather unwise. As a result, this thesis first aims to perform accurate state estimation before designing controllers for time-optimal trajectory tracking. Again, another constraint of using only a single sensor (i.e. the Inertial Measurement Unit) is added to make the drone race in GPS denied environments. As a result, the goal of the thesis is two-fold i.e. making accurate state estimators while using limited sensors and designing optimal controllers for taking the quickest trajectory through the arena. To achieve the goal of accurate state estimation, existing techniques are studied. Several features from each of these methods are selected to design a new estimator. To achieve the goal of time-optimal trajectory generation, firstly, the flaws of traditional control methods are pointed out. A new optimal-control technique is proposed, which makes use of fundamental principles dating back several decades. This principle is then fused along with present-day optimization solvers. Finally, the proposed state estimation and control algorithm are compared against prior (benchmarked) techniques in the area. Compared to existing optimal control techniques, the proposed algorithm leads to faster trajectories and consumes less computational power onboard. |
Dorian Heitzig Wing deformation measurements of the DelFly II in different flight conditions (Masters Thesis) TU Delft Aerospace Engineering, 2019, (van Oudheusden, B.W. (mentor); De Breuker, R. (graduation committee); de Wagter, C. (graduation committee); Olejnik, D.A. (mentor); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:cc607dbb-7116-4c9f-991f-988d832833a9,
title = {Wing deformation measurements of the DelFly II in different flight conditions},
author = {Dorian Heitzig},
url = {http://resolver.tudelft.nl/uuid:cc607dbb-7116-4c9f-991f-988d832833a9},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering},
abstract = {This study investigates the wing deformation of the flapping-wing micro air vehicle (MAV) DelFly II in various flight configurations. Experiments were carried out with the MAV tethered in a windtunnel test section. To determine the best suited measurement approach, a trade-off study was carried out which showed that a point tracking approach with background illumination is most suitable. The therefore used high-speed camera pair and illumination were mounted on the same rotating frame with the DelFly, which allowed adequate viewing axes of the wings at for all pitch angles. Processing was done a purpose-build algorithm, allowing 136 points per wing to be measured simultaneously with an average lost point ratio of 3.4 % and an estimated accuracy of 0.25 mm. Results of hovering flight show some previously unnoticed behaviors. First, it was noted that the upper and lower wing on each side do not deform purely symmetric but show some considerable asymmetric behavior like heave and camber production. Furthermore, the upper wing shows a torsional wave and recoil behavior at faster flapping frequencies, which was shown to be beneficial in insect flight. Lastly, it was found that an air-buffer remains present between the wing surfaces at all times of the clap-and-peel motion (apart from the root trailing edge). This air-buffer increases once freestream velocity is added, which is investigated during the climbing flight study. Here, the reduced angle of attack of the wing is assumed to reduce the wing loading at faster climb, resulting in lower deformations outside the clap-and-peel motion. The isolated effect of a body pitch angle is also studied. Here, the asymmetrical freestream direction results in larger asymmetries such as wing alignment with the freestream direction and reduced camber and even camber reversal during the upstroke. In forward flight the pitch angle is changed simultaneously with the flapping frequency and freestream velocity. Due to the non-linear properties the wing deforms not directly as a superposition of the individual effects. Deviations are mostly present in increased asymmetry in incidence angle, while the camber behaves more linear and the clap-and-peel motion also remains relatively unchanged. The torsional wave and recoil are here however reduced. Descending flight was also tested. Velocities below 1m/s result in relatively minor deformation changes, while faster descent leads to large flapping frequency fluctuations, making interpretation of the results impossible.},
note = {van Oudheusden, B.W. (mentor); De Breuker, R. (graduation committee); de Wagter, C. (graduation committee); Olejnik, D.A. (mentor); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
This study investigates the wing deformation of the flapping-wing micro air vehicle (MAV) DelFly II in various flight configurations. Experiments were carried out with the MAV tethered in a windtunnel test section. To determine the best suited measurement approach, a trade-off study was carried out which showed that a point tracking approach with background illumination is most suitable. The therefore used high-speed camera pair and illumination were mounted on the same rotating frame with the DelFly, which allowed adequate viewing axes of the wings at for all pitch angles. Processing was done a purpose-build algorithm, allowing 136 points per wing to be measured simultaneously with an average lost point ratio of 3.4 % and an estimated accuracy of 0.25 mm. Results of hovering flight show some previously unnoticed behaviors. First, it was noted that the upper and lower wing on each side do not deform purely symmetric but show some considerable asymmetric behavior like heave and camber production. Furthermore, the upper wing shows a torsional wave and recoil behavior at faster flapping frequencies, which was shown to be beneficial in insect flight. Lastly, it was found that an air-buffer remains present between the wing surfaces at all times of the clap-and-peel motion (apart from the root trailing edge). This air-buffer increases once freestream velocity is added, which is investigated during the climbing flight study. Here, the reduced angle of attack of the wing is assumed to reduce the wing loading at faster climb, resulting in lower deformations outside the clap-and-peel motion. The isolated effect of a body pitch angle is also studied. Here, the asymmetrical freestream direction results in larger asymmetries such as wing alignment with the freestream direction and reduced camber and even camber reversal during the upstroke. In forward flight the pitch angle is changed simultaneously with the flapping frequency and freestream velocity. Due to the non-linear properties the wing deforms not directly as a superposition of the individual effects. Deviations are mostly present in increased asymmetry in incidence angle, while the camber behaves more linear and the clap-and-peel motion also remains relatively unchanged. The torsional wave and recoil are here however reduced. Descending flight was also tested. Velocities below 1m/s result in relatively minor deformation changes, while faster descent leads to large flapping frequency fluctuations, making interpretation of the results impossible. |
Abhishek Chatterjee Monocular Optical Flow based Attitude Estimation in Micro Aerial Vehicles: A Bio-Inspired Approach (Masters Thesis) TU Delft Aerospace Engineering, 2019, (de Croon, G.C.H.E. (mentor); Olejnik, D.A. (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:ce520f94-bd3c-41a5-9ddd-edfdf6ead35e,
title = {Monocular Optical Flow based Attitude Estimation in Micro Aerial Vehicles: A Bio-Inspired Approach},
author = {Abhishek Chatterjee},
url = {http://resolver.tudelft.nl/uuid:ce520f94-bd3c-41a5-9ddd-edfdf6ead35e},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering},
abstract = {The exceptional flight capabilities of insects have long amazed and inspired researchers and roboticists striving to make Micro Aerial Vehicles (MAVs) smaller and more agile. It is well known that optical flow plays a prominent role in insect flight control and navigation, and hence it is being increasingly investigated for applications in flying robots as well. However, optical flow based strategies for estimation and stabilization of orientation remain obscure in literature. In this report, we introduce a novel state estimation algorithm based on optical flow measurements and the knowledge of efference copies. The proposed technique estimates the following states of a flying robot (constrained to move with three degrees of freedom): roll angle, rate of change of roll angle, horizontal and vertical components of velocity and height. The estimator only utilizes the knowledge of control inputs and optical flow measurements obtained from a downward looking monocular camera. Through non-linear observability analysis, we theoretically prove the feasibility of estimating the attitude of a MAV using ventral flow and divergence measurements. Based on the findings of the observability analysis, an extended Kalman filter state estimator is designed and its performance is verified in simulations and through flight data recorded on a real flying robot. To the best of our knowledge, the introduced strategy is the first attitude estimation technique that utilizes monocular optical flow as the only sensory information.<br/><br/>Besides the investigation on optical flow based attitude estimation technique, this thesis presents a comprehensive literature survey on the main topics relevant to the work.},
note = {de Croon, G.C.H.E. (mentor); Olejnik, D.A. (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
The exceptional flight capabilities of insects have long amazed and inspired researchers and roboticists striving to make Micro Aerial Vehicles (MAVs) smaller and more agile. It is well known that optical flow plays a prominent role in insect flight control and navigation, and hence it is being increasingly investigated for applications in flying robots as well. However, optical flow based strategies for estimation and stabilization of orientation remain obscure in literature. In this report, we introduce a novel state estimation algorithm based on optical flow measurements and the knowledge of efference copies. The proposed technique estimates the following states of a flying robot (constrained to move with three degrees of freedom): roll angle, rate of change of roll angle, horizontal and vertical components of velocity and height. The estimator only utilizes the knowledge of control inputs and optical flow measurements obtained from a downward looking monocular camera. Through non-linear observability analysis, we theoretically prove the feasibility of estimating the attitude of a MAV using ventral flow and divergence measurements. Based on the findings of the observability analysis, an extended Kalman filter state estimator is designed and its performance is verified in simulations and through flight data recorded on a real flying robot. To the best of our knowledge, the introduced strategy is the first attitude estimation technique that utilizes monocular optical flow as the only sensory information.<br/><br/>Besides the investigation on optical flow based attitude estimation technique, this thesis presents a comprehensive literature survey on the main topics relevant to the work. |
Dave Kroezen Online Reinforcement Learning for Flight Control: An Adaptive Critic Design without prior model knowledge (Masters Thesis) TU Delft Aerospace Engineering; TU Delft Control & Simulation, 2019, (van Kampen, E. (mentor); de Croon, G.C.H.E. (graduation committee); Mitici, M.A. (graduation committee); Pan, W. (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:38547b1d-0535-4b30-a348-67ac40c7ddcc,
title = {Online Reinforcement Learning for Flight Control: An Adaptive Critic Design without prior model knowledge},
author = {Dave Kroezen},
url = {http://resolver.tudelft.nl/uuid:38547b1d-0535-4b30-a348-67ac40c7ddcc},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering; TU Delft Control & Simulation},
abstract = {Online Reinforcement Learning is a possible solution for adaptive nonlinear flight control. In this research an Adaptive Critic Design (ACD) based on Dual Heuristic Dynamic Programming (DHP) is developed and implemented on a simulated Cessna Citation 550 aircraft. Using an online identified system model approximation, the method is independent of prior model knowledge. The agent consists of two Artificial Neural Networks (ANNs) which form the Adaptive Critic Design and is supplemented with a Recursive Least Squares (RLS) online model estimation. The implemented agent is demonstrated to learn a near optimal control policy for different operating points, which is capable of tracking pitch and roll rate while actively minimizing the sideslip angle in a faster than real-time simulation. Providing limited model knowledge is shown to increase the learning, performance and robustness of the controller.},
note = {van Kampen, E. (mentor); de Croon, G.C.H.E. (graduation committee); Mitici, M.A. (graduation committee); Pan, W. (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Online Reinforcement Learning is a possible solution for adaptive nonlinear flight control. In this research an Adaptive Critic Design (ACD) based on Dual Heuristic Dynamic Programming (DHP) is developed and implemented on a simulated Cessna Citation 550 aircraft. Using an online identified system model approximation, the method is independent of prior model knowledge. The agent consists of two Artificial Neural Networks (ANNs) which form the Adaptive Critic Design and is supplemented with a Recursive Least Squares (RLS) online model estimation. The implemented agent is demonstrated to learn a near optimal control policy for different operating points, which is capable of tracking pitch and roll rate while actively minimizing the sideslip angle in a faster than real-time simulation. Providing limited model knowledge is shown to increase the learning, performance and robustness of the controller. |
Jorgen Nijboer Longitudinal grey-box model identification of a tailless flapping-wing MAV based on free-flight data (Masters Thesis) TU Delft Aerospace Engineering, 2019, (de Visser, Coen (mentor); Karasek, Matej (mentor); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:a37b96b7-90de-4f22-99ce-87cc97d414d9,
title = {Longitudinal grey-box model identification of a tailless flapping-wing MAV based on free-flight data},
author = {Jorgen Nijboer},
url = {http://resolver.tudelft.nl/uuid:a37b96b7-90de-4f22-99ce-87cc97d414d9},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering},
abstract = {Tailless flapping wing micro aerial vehicles (FMWAV) are known for their light weight and agility. However, given the fact that these FWMAVs have been recently developed, their flight dynamics have not yet been fully explained. In this paper we will develop local time-averaged longitudinal grey-box models based on closed-loop system identification techniques, where free-flight experimental data, obtained from the DelFly Nimble, is used to estimate and validate the local grey-box models. With these models we can take the first steps towards fully understanding the flight dynamics of tailless FWMAVs. The consequence of the tailless configuration is inherent instability and therefore tailless FWMAVs are generally more complex, compared to its tailed counterpart, and require a active feedback control system. The active feedback control system introduces additional challenges to the system identification process since it follows that feedback control works against the objectives of system identification. Dynamic effects that play a major role when studying the dynamic behaviour of FWMAVs are the sub-flap and the flap cycle-averaged effects. However, in this paper, we are only interested in modelling the flap cycle-averaged (time-averaged) effects of the DelFly Nimble. Based on this approach, grey-box models were estimated and validated for airspeeds near hover condition 0 m/s, up to 1.0 m/s forward flight. Despite the complexity of the system, we were able to obtain low-order local models that are both efficient and accurate (R2 values up to 0.92) to predict the flight dynamic behaviour of the DelFly Nimble and can therefore be used for stability analysis, simulation and control design.},
note = {de Visser, Coen (mentor); Karasek, Matej (mentor); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Tailless flapping wing micro aerial vehicles (FMWAV) are known for their light weight and agility. However, given the fact that these FWMAVs have been recently developed, their flight dynamics have not yet been fully explained. In this paper we will develop local time-averaged longitudinal grey-box models based on closed-loop system identification techniques, where free-flight experimental data, obtained from the DelFly Nimble, is used to estimate and validate the local grey-box models. With these models we can take the first steps towards fully understanding the flight dynamics of tailless FWMAVs. The consequence of the tailless configuration is inherent instability and therefore tailless FWMAVs are generally more complex, compared to its tailed counterpart, and require a active feedback control system. The active feedback control system introduces additional challenges to the system identification process since it follows that feedback control works against the objectives of system identification. Dynamic effects that play a major role when studying the dynamic behaviour of FWMAVs are the sub-flap and the flap cycle-averaged effects. However, in this paper, we are only interested in modelling the flap cycle-averaged (time-averaged) effects of the DelFly Nimble. Based on this approach, grey-box models were estimated and validated for airspeeds near hover condition 0 m/s, up to 1.0 m/s forward flight. Despite the complexity of the system, we were able to obtain low-order local models that are both efficient and accurate (R2 values up to 0.92) to predict the flight dynamic behaviour of the DelFly Nimble and can therefore be used for stability analysis, simulation and control design. |
Jari Blom Onboard Visual Control of a Quadcopter MAV performing a Landing Task: on a Platform of Unknown Size and Location (Masters Thesis) TU Delft Aerospace Engineering; TU Delft Control & Simulation, 2019, (de Croon, G.C.H.E. (graduation committee); Scheper, K.Y.W. (mentor); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:57cfce9e-75aa-42f1-bed4-64b64b927fb4,
title = {Onboard Visual Control of a Quadcopter MAV performing a Landing Task: on a Platform of Unknown Size and Location},
author = {Jari Blom},
url = {http://resolver.tudelft.nl/uuid:57cfce9e-75aa-42f1-bed4-64b64b927fb4},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering; TU Delft Control & Simulation},
abstract = {Vision based control allows Micro Air Vehicles (MAV) to move autonomously in GPS-denied environments, for example in indoor applications. An open issue in this field is landing on an unknown platform. The difficulty in visual control w.r.t. such an unknown platform, is a lack of scale. Without knowledge of the scale of offsets and object sizes (without height knowledge from GPS) it is difficult to determine an appropriate response from the controller. A control algorithm is designed to fit these requirements using an adaptation of an optical flow divergence based landing scheme, combined with an Image Based Visual Servoing approach applied to features in the Virtual Camera. The approach leads to satisfactory behavior in Gazebo simulations. It results in a robust controller for a range of starting heights and divergence settings.},
note = {de Croon, G.C.H.E. (graduation committee); Scheper, K.Y.W. (mentor); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Vision based control allows Micro Air Vehicles (MAV) to move autonomously in GPS-denied environments, for example in indoor applications. An open issue in this field is landing on an unknown platform. The difficulty in visual control w.r.t. such an unknown platform, is a lack of scale. Without knowledge of the scale of offsets and object sizes (without height knowledge from GPS) it is difficult to determine an appropriate response from the controller. A control algorithm is designed to fit these requirements using an adaptation of an optical flow divergence based landing scheme, combined with an Image Based Visual Servoing approach applied to features in the Virtual Camera. The approach leads to satisfactory behavior in Gazebo simulations. It results in a robust controller for a range of starting heights and divergence settings. |
Bianca Bendriş Decentralized Stochastic Optimal Control for a Swarm of Micro Aerial Vehicles (Masters Thesis) TU Delft Aerospace Engineering, 2019, (de Croon, Guido (mentor); McGuire, Kimberly (graduation committee); Kappen, Bert (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:0cd4f9e3-faf3-4e65-995c-7dd401c8da4c,
title = {Decentralized Stochastic Optimal Control for a Swarm of Micro Aerial Vehicles},
author = {Bianca Bendriş},
url = {http://resolver.tudelft.nl/uuid:0cd4f9e3-faf3-4e65-995c-7dd401c8da4c},
year = {2019},
date = {2019-01-01},
school = {TU Delft Aerospace Engineering},
abstract = {In this work, we model a multi-robot formation planning and control task as an optimization problem, which we solve on-line and in a decentralized manner using the Stochastic Optimal Control (SOC) framework. Typically, the solution of a SOC problem requires solving the Hamilton-Jacobi-Bellman (HJB) equation for all system states and controls. However, this operation becomes intractable when high-dimensional systems are used. In recent years, advances on a certain type of SOC problem, which can be efficiently solved by sampling from a diffusion process have been presented and are better known as path integral (PI) control. We build upon this theory and implement a decentralized formulation of the PI algorithm to compute the optimal controls of real Micro Aerial Vehicles (MAVs) flying in formation using solely on-board computational resources. One challenging aspect of the PI control method is the efficient sampling of useful trajectories. It is not clear how to guide the samples towards the optimal states. To this end, we propose a probe enhanced importance sampling (PEIS) method which performs a coarse exploration of the state space with the objective of identifying an optimal guiding trajectory around which the samples are taken. The feasibility of the proposed method is shown by means of simulation and real-hardware experiments with up to four MAVs in an indoor environment.},
note = {de Croon, Guido (mentor); McGuire, Kimberly (graduation committee); Kappen, Bert (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
In this work, we model a multi-robot formation planning and control task as an optimization problem, which we solve on-line and in a decentralized manner using the Stochastic Optimal Control (SOC) framework. Typically, the solution of a SOC problem requires solving the Hamilton-Jacobi-Bellman (HJB) equation for all system states and controls. However, this operation becomes intractable when high-dimensional systems are used. In recent years, advances on a certain type of SOC problem, which can be efficiently solved by sampling from a diffusion process have been presented and are better known as path integral (PI) control. We build upon this theory and implement a decentralized formulation of the PI algorithm to compute the optimal controls of real Micro Aerial Vehicles (MAVs) flying in formation using solely on-board computational resources. One challenging aspect of the PI control method is the efficient sampling of useful trajectories. It is not clear how to guide the samples towards the optimal states. To this end, we propose a probe enhanced importance sampling (PEIS) method which performs a coarse exploration of the state space with the objective of identifying an optimal guiding trajectory around which the samples are taken. The feasibility of the proposed method is shown by means of simulation and real-hardware experiments with up to four MAVs in an indoor environment. |
Thomas Fijen Persistent Surveillance of a Greenhouse: Evolved neural network controllers for a swarm of UAVs (Masters Thesis) TU Delft Mechanical, Maritime and Materials Engineering; TU Delft Delft Center for Systems and Control, 2019, (Keviczky, T. (mentor); de Croon, G.C.H.E. (mentor); Coppola, M. (graduation committee); Delft University of Technology (degree granting institution)). @mastersthesis{uuid:ec42642a-5872-4177-b514-c3679f6b4055,
title = {Persistent Surveillance of a Greenhouse: Evolved neural network controllers for a swarm of UAVs},
author = {Thomas Fijen},
url = {http://resolver.tudelft.nl/uuid:ec42642a-5872-4177-b514-c3679f6b4055},
year = {2019},
date = {2019-01-01},
school = {TU Delft Mechanical, Maritime and Materials Engineering; TU Delft Delft Center for Systems and Control},
abstract = {With the growing population the agricultural industry needs to find and implement new methods for enhancing food production. Using a Micro Aerial Vehicle (MAV) in Precision Agriculture (PA) offers a large number of benefits such as enabling the farmer to create targeted strategies to increase crop yield, reduced waste and halt the spread of diseases. Despite these advantages, the use of MAVs, particularly in greenhouses, is still very limited. To this end, this thesis seeks to combine, improve and implement existing strategies to solve the persistent surveillance task for a swarm of MAVs operating in a greenhouse environment.<br/>Broadly speaking, the persistent surveillance task seeks to find the optimal paths for a swarm of MAVs such that every point within the Mission Space (MS) is visited and they must minimise the time between successive visits. This will ensure that the MAVs are able fly through the entire greenhouse to collect up-to-date data about all the crops and the local environment. Naturally, on a physical system one has to deal with the limited flight times of the MAVs. This factor becomes very important to the effectiveness of the solution and is critical to the continuous operation of the MAVs.<br/>In literature, many methods have be proposed to solve this task, but the majority are still only tested in simulation. As a result, many works do not consider some physical constraints that will be applied to the system during implementation in a real-world setting. For example, in most cases the authors do not consider the limited fuel available to the agents or they do not consider a practical alternative indoor positioning system to GPS. In this work the problem has been divided into two main sub-tasks, namely; the persistent surveillance task and the refuelling task.<br/>For the persistent surveillance task it was decided to implement a reactive controller, in the form of an evolved Neural Network (NN), which was run on-board the MAVs. The NN used positional information from the other members of the swarm along with limited environmental information to supply its MAV with a command velocity. These NN controllers could achieve coverage levels of over 95% while simultaneously avoiding collisions between 8 MAVs in a 25m x 25m MS. Later, this method was shown to be robust to failures and scalable in terms of both MS and swarm size.<br/>When dealing with the fuel constraints, a Behaviour Tree (BT) was used to determine when the MAV should return to the depot. Surprisingly, when combined with the NN controllers the system experienced an increase in performance across all the defined metrics. No MAV failed due to low fuel levels, coverage increased to 97.41%, average cell age to 52.39s and the number of tests were no collisions were recorded more than doubled. This increase in performance was attributed to the fact that the refuelling periodically drew the MAV towards the centre of the MS. This is counter to the evolved behaviours of the NN where the MAVs would mainly focus their attention around the edges of the MS.<br},
note = {Keviczky, T. (mentor); de Croon, G.C.H.E. (mentor); Coppola, M. (graduation committee); Delft University of Technology (degree granting institution)},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
With the growing population the agricultural industry needs to find and implement new methods for enhancing food production. Using a Micro Aerial Vehicle (MAV) in Precision Agriculture (PA) offers a large number of benefits such as enabling the farmer to create targeted strategies to increase crop yield, reduced waste and halt the spread of diseases. Despite these advantages, the use of MAVs, particularly in greenhouses, is still very limited. To this end, this thesis seeks to combine, improve and implement existing strategies to solve the persistent surveillance task for a swarm of MAVs operating in a greenhouse environment.<br/>Broadly speaking, the persistent surveillance task seeks to find the optimal paths for a swarm of MAVs such that every point within the Mission Space (MS) is visited and they must minimise the time between successive visits. This will ensure that the MAVs are able fly through the entire greenhouse to collect up-to-date data about all the crops and the local environment. Naturally, on a physical system one has to deal with the limited flight times of the MAVs. This factor becomes very important to the effectiveness of the solution and is critical to the continuous operation of the MAVs.<br/>In literature, many methods have be proposed to solve this task, but the majority are still only tested in simulation. As a result, many works do not consider some physical constraints that will be applied to the system during implementation in a real-world setting. For example, in most cases the authors do not consider the limited fuel available to the agents or they do not consider a practical alternative indoor positioning system to GPS. In this work the problem has been divided into two main sub-tasks, namely; the persistent surveillance task and the refuelling task.<br/>For the persistent surveillance task it was decided to implement a reactive controller, in the form of an evolved Neural Network (NN), which was run on-board the MAVs. The NN used positional information from the other members of the swarm along with limited environmental information to supply its MAV with a command velocity. These NN controllers could achieve coverage levels of over 95% while simultaneously avoiding collisions between 8 MAVs in a 25m x 25m MS. Later, this method was shown to be robust to failures and scalable in terms of both MS and swarm size.<br/>When dealing with the fuel constraints, a Behaviour Tree (BT) was used to determine when the MAV should return to the depot. Surprisingly, when combined with the NN controllers the system experienced an increase in performance across all the defined metrics. No MAV failed due to low fuel levels, coverage increased to 97.41%, average cell age to 52.39s and the number of tests were no collisions were recorded more than doubled. This increase in performance was attributed to the fact that the refuelling periodically drew the MAV towards the centre of the MS. This is counter to the evolved behaviours of the NN where the MAVs would mainly focus their attention around the edges of the MS.<br |
Miscellaneous
|
Hermann Blum; Silvan Rohrbach; Marija Popovic; Luca Bartolomei; Roland Siegwart Active Learning for UAV-based Semantic Mapping (Miscellaneous) 2019. @misc{1908.11157,
title = {Active Learning for UAV-based Semantic Mapping},
author = {Hermann Blum and Silvan Rohrbach and Marija Popovic and Luca Bartolomei and Roland Siegwart},
url = {https://arxiv.org/abs/1908.11157},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Ajith Anil Meera; Marija Popovic; Alexander Millane; Roland Siegwart Obstacle-aware Adaptive Informative Path Planning for UAV-based Target Search (Miscellaneous) 2019. @misc{1902.10182,
title = {Obstacle-aware Adaptive Informative Path Planning for UAV-based Target Search},
author = {Ajith Anil Meera and Marija Popovic and Alexander Millane and Roland Siegwart},
url = {https://arxiv.org/abs/1902.10182},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Marija Popovic; Teresa Vidal-Calleja; Jen Jen Chung; Juan Nieto; Roland Siegwart Informative Path Planning for Active Field Mapping under Localization Uncertainty (Miscellaneous) 2019. @misc{1902.09660,
title = {Informative Path Planning for Active Field Mapping under Localization Uncertainty},
author = {Marija Popovic and Teresa Vidal-Calleja and Jen Jen Chung and Juan Nieto and Roland Siegwart},
url = {https://arxiv.org/abs/1902.09660},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Guido Croon Obstacle detection using horizon-based learning (Miscellaneous) 2019, (G06K). @misc{23f82cd5875f4767a1852605313bc710,
title = {Obstacle detection using horizon-based learning},
author = {Guido Croon},
url = {https://research.tudelft.nl/en/publications/obstacle-detection-using-horizon-based-learning},
year = {2019},
date = {2019-01-01},
note = {G06K},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Bardienus P. Duisterhof; Srivatsan Krishnan; Jonathan J. Cruz; Colby R. Banbury; William Fu; Aleksandra Faust; Guido C. H. E. Croon; Vijay Janapa Reddi Learning to Seek: Autonomous Source Seeking with Deep Reinforcement Learning Onboard a Nano Drone Microcontroller (Miscellaneous) 2019. @misc{1909.11236,
title = {Learning to Seek: Autonomous Source Seeking with Deep Reinforcement Learning Onboard a Nano Drone Microcontroller},
author = {Bardienus P. Duisterhof and Srivatsan Krishnan and Jonathan J. Cruz and Colby R. Banbury and William Fu and Aleksandra Faust and Guido C. H. E. Croon and Vijay Janapa Reddi},
url = {https://arxiv.org/abs/1909.11236},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Tom Dijk; Guido C. H. E. Croon How do neural networks see depth in single images? (Miscellaneous) 2019. @misc{1905.07005,
title = {How do neural networks see depth in single images?},
author = {Tom Dijk and Guido C. H. E. Croon},
url = {https://arxiv.org/abs/1905.07005},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
Hector Garcia Marina; Ewoud Smeur Flexible collaborative transportation by a team of rotorcraft (Miscellaneous) 2019. @misc{1902.00279,
title = {Flexible collaborative transportation by a team of rotorcraft},
author = {Hector Garcia Marina and Ewoud Smeur},
url = {https://arxiv.org/abs/1902.00279},
year = {2019},
date = {2019-01-01},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
|
PhD Theses
|
Kirk Scheper Abstraction as a Tool to Bridge the Reality Gap in Evolutionary Robotics (PhD Thesis) Delft University of Technology, 2019. @phdthesis{389f453ef7ff4feaa35332755cf9a9e1,
title = {Abstraction as a Tool to Bridge the Reality Gap in Evolutionary Robotics},
author = {Kirk Scheper},
url = {https://research.tudelft.nl/en/publications/abstraction-as-a-tool-to-bridge-the-reality-gap-in-evolutionary-r},
doi = {10.4233/uuid:389f453e-f7ff-4fea-a353-32755cf9a9e1},
year = {2019},
date = {2019-09-10},
school = {Delft University of Technology},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
|
Kimberly McGuire Indoor swarm exploration with Pocket Drones (PhD Thesis) Delft University of Technology, 2019, ISBN: 978-94-6182-976-4. @phdthesis{48ed7edc934e4dfcb35cfe04d55caee1,
title = {Indoor swarm exploration with Pocket Drones},
author = {Kimberly McGuire},
url = {https://research.tudelft.nl/en/publications/indoor-swarm-exploration-with-pocket-drones},
doi = {10.4233/uuid:48ed7edc-934e-4dfc-b35c-fe04d55caee1},
isbn = {978-94-6182-976-4},
year = {2019},
date = {2019-01-01},
school = {Delft University of Technology},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
|
2018
|
Journal Articles
|
Mario Coppola; Kimberly N McGuire; Kirk Y W Scheper; Guido C H E de Croon On-board communication-based relative localization for collision avoidance in Micro Air Vehicle teams (Journal Article) In: Autonomous Robots, vol. 42, no. 8, pp. 1787–1805, 2018, ISSN: 1573-7527. @article{coppola2018onboard,
title = {On-board communication-based relative localization for collision avoidance in Micro Air Vehicle teams},
author = {Mario Coppola and Kimberly N McGuire and Kirk Y W Scheper and Guido C H E de Croon},
url = {https://doi.org/10.1007/s10514-018-9760-3},
doi = {10.1007/s10514-018-9760-3},
issn = {1573-7527},
year = {2018},
date = {2018-12-01},
journal = {Autonomous Robots},
volume = {42},
number = {8},
pages = {1787--1805},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Christophe Wagter; Matej Karasek; Guido Croon Quad-thopter: Tailless Flapping Wing Robot with 4 Pairs of Wings (Journal Article) In: International Journal of Micro Air Vehicles, vol. 10, no. 3, pp. 244–253, 2018, ISSN: 1756-8293. @article{c73c687620184b40b678dfeab41c91ef,
title = {Quad-thopter: Tailless Flapping Wing Robot with 4 Pairs of Wings},
author = {Christophe Wagter and Matej Karasek and Guido Croon},
url = {https://research.tudelft.nl/en/publications/quad-thopter-tailless-flapping-wing-robot-with-4-pairs-of-wings},
doi = {10.1177/1756829318794972},
issn = {1756-8293},
year = {2018},
date = {2018-09-21},
journal = {International Journal of Micro Air Vehicles},
volume = {10},
number = {3},
pages = {244–253},
publisher = {Multi-Science Publishing Co. Ltd},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Alex Del Estal Herrero; Mustafa Perçin; Matej Karasek; Bas Oudheusden Flow Visualization around a Flapping-Wing Micro Air Vehicle in Free Flight Using Large-Scale PIV (Journal Article) In: Aerospace — Open Access Aeronautics and Astronautics Journal, vol. 5, no. 4, 2018, ISSN: 2226-4310. @article{9b9f341e8bf24b40b4562067009c1544,
title = {Flow Visualization around a Flapping-Wing Micro Air Vehicle in Free Flight Using Large-Scale PIV},
author = {Alex Del Estal Herrero and Mustafa Perçin and Matej Karasek and Bas Oudheusden},
url = {https://research.tudelft.nl/en/publications/flow-visualization-around-a-flapping-wing-micro-air-vehicle-in-fr-2},
doi = {10.3390/aerospace5040099},
issn = {2226-4310},
year = {2018},
date = {2018-09-20},
journal = {Aerospace — Open Access Aeronautics and Astronautics Journal},
volume = {5},
number = {4},
publisher = {MDPI},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Alex Del Estal Herrero; Mustafa Perc cin; Matej Karasek; Bas Oudheusden Flow Visualization around a Flapping-Wing Micro Air Vehicle in Free Flight Using Large-Scale PIV (Journal Article) In: Aerospace — Open Access Aeronautics and Astronautics Journal, vol. 5, no. 4, 2018, ISSN: 2226-4310. @article{9b9f341e8bf24b40b4562067009c1544b,
title = {Flow Visualization around a Flapping-Wing Micro Air Vehicle in Free Flight Using Large-Scale PIV},
author = {Alex Del Estal Herrero and Mustafa Perc cin and Matej Karasek and Bas Oudheusden},
url = {https://research.tudelft.nl/en/publications/flow-visualization-around-a-flapping-wing-micro-air-vehicle-in-fr-2},
doi = {10.3390/aerospace5040099},
issn = {2226-4310},
year = {2018},
date = {2018-09-20},
journal = {Aerospace — Open Access Aeronautics and Astronautics Journal},
volume = {5},
number = {4},
publisher = {MDPI},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
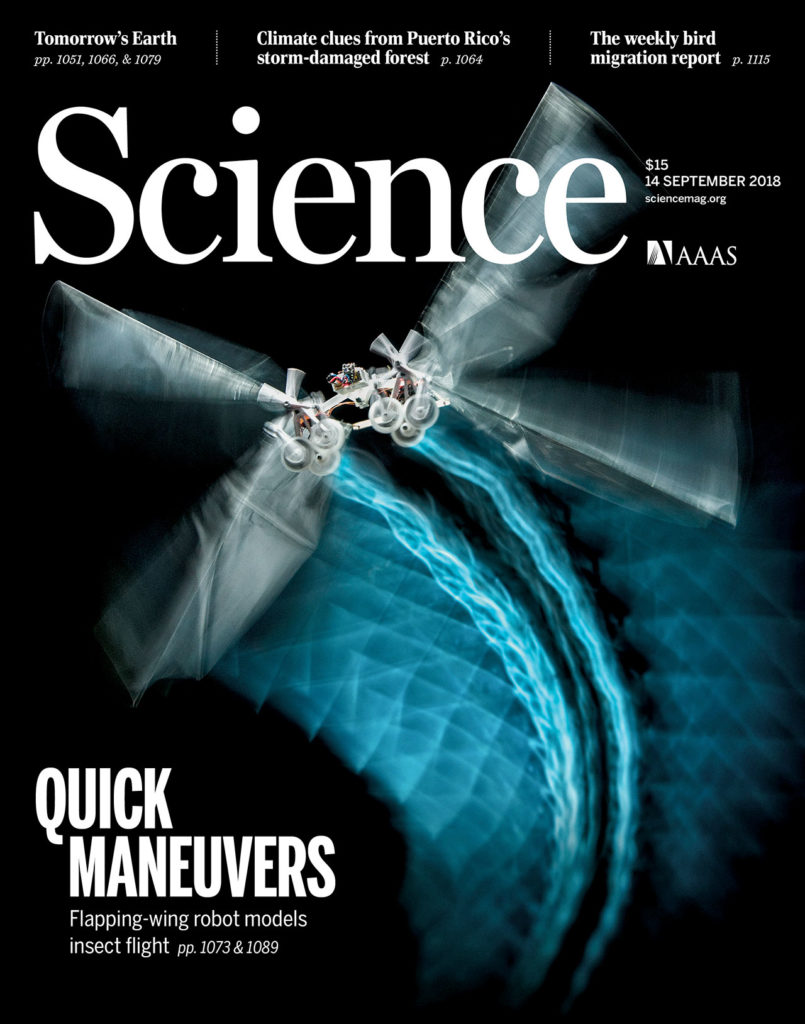
Matej Karasek; Florian T. Muijres; Christophe De Wagter; Bart D. W. Remes; Guido C. H. E. De Croon A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns (Journal Article) In: Science, vol. 361, no. 6407, pp. 1089–1094, 2018, ISSN: 0036-8075. @article{e47f9e90bce74b93988a4492b6e50326,
title = {A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns},
author = {Matej Karasek and Florian T. Muijres and Christophe De Wagter and Bart D. W. Remes and Guido C. H. E. De Croon},
url = {https://research.tudelft.nl/en/publications/a-tailless-aerial-robotic-flapper-reveals-that-flies-use-torque-c},
doi = {10.1126/science.aat0350},
issn = {0036-8075},
year = {2018},
date = {2018-09-14},
journal = {Science},
volume = {361},
number = {6407},
pages = {1089–1094},
publisher = {American Association for the Advancement of Science},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Matěj Karásek; Florian T Muijres; Christophe De Wagter; Bart D W Remes; Guido C H E de Croon A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns (Journal Article) In: Science, vol. 361, no. 6407, pp. 1089–1094, 2018, ISSN: 0036-8075. @article{Karasek2018,
title = {A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns},
author = {Mat{ě}j Karásek and Florian T Muijres and Christophe De Wagter and Bart D W Remes and Guido C H E de Croon},
url = {http://www.sciencemag.org/lookup/doi/10.1126/science.aat0350},
doi = {10.1126/science.aat0350},
issn = {0036-8075},
year = {2018},
date = {2018-09-01},
journal = {Science},
volume = {361},
number = {6407},
pages = {1089--1094},
publisher = {American Association for the Advancement of Science},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Sjoerd Tijmons; Matěj Karásek; Guido De Croon Attitude control system for a lightweight flapping wing MAV (Journal Article) In: Bioinspiration and Biomimetics, vol. 13, no. 5, 2018, ISSN: 1748-3182. @article{43792c02912d4bae99009d457737436e,
title = {Attitude control system for a lightweight flapping wing MAV},
author = {Sjoerd Tijmons and Matěj Karásek and Guido De Croon},
url = {https://research.tudelft.nl/en/publications/attitude-control-system-for-a-lightweight-flapping-wing-mav},
doi = {10.1088/1748-3190/aab68c},
issn = {1748-3182},
year = {2018},
date = {2018-07-20},
journal = {Bioinspiration and Biomimetics},
volume = {13},
number = {5},
publisher = {IOP Publishing},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Sjoerd Tijmons; Christophe Wagter; Bart Remes; Guido Croon Autonomous Door and Corridor Traversal with a 20-Gram Flapping Wing MAV by Onboard Stereo Vision (Journal Article) In: Aerospace — Open Access Aeronautics and Astronautics Journal, vol. 5, no. 3, 2018, ISSN: 2226-4310. @article{a8d813d2e8174bbabcda8e05ed401a26,
title = {Autonomous Door and Corridor Traversal with a 20-Gram Flapping Wing MAV by Onboard Stereo Vision},
author = {Sjoerd Tijmons and Christophe Wagter and Bart Remes and Guido Croon},
url = {https://research.tudelft.nl/en/publications/autonomous-door-and-corridor-traversal-with-a-20-gram-flapping-wi},
doi = {10.3390/aerospace5030069},
issn = {2226-4310},
year = {2018},
date = {2018-06-25},
journal = {Aerospace — Open Access Aeronautics and Astronautics Journal},
volume = {5},
number = {3},
publisher = {MDPI},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
G. J. J. Dalen; Kimberly McGuire; Guido Croon Visual Homing for Micro Aerial Vehicles Using Scene Familiarity (Journal Article) In: Unmanned Systems, vol. 06, no. 02, pp. 119–130, 2018, ISSN: 2301-3850. @article{ca31d3aa76e44677bae72514f696f67d,
title = {Visual Homing for Micro Aerial Vehicles Using Scene Familiarity},
author = {G. J. J. Dalen and Kimberly McGuire and Guido Croon},
url = {https://research.tudelft.nl/en/publications/visual-homing-for-micro-aerial-vehicles-using-scene-familiarity},
doi = {10.1142/S230138501850005X},
issn = {2301-3850},
year = {2018},
date = {2018-06-08},
journal = {Unmanned Systems},
volume = {06},
number = {02},
pages = {119–130},
publisher = {World Scientific Publishing},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Julien Marzat; Guido de Croon; Friedrich Fraundorfer; Pascal Morin; Antonios Tsourdos Estimation and control for MAV navigation in GPS-denied cluttered environments (Journal Article) In: International Journal of Micro Air Vehicles, vol. 10, no. 2, pp. 125–239, 2018, ISSN: 1756-8293. @article{cc6fa0ae4bdf4b3ba9ef8eb6a5290a2c,
title = {Estimation and control for MAV navigation in GPS-denied cluttered environments},
author = {Julien Marzat and Guido de Croon and Friedrich Fraundorfer and Pascal Morin and Antonios Tsourdos},
url = {https://research.tudelft.nl/en/publications/estimation-and-control-for-mav-navigation-in-gps-denied-cluttered},
doi = {10.1177/1756829318772901},
issn = {1756-8293},
year = {2018},
date = {2018-06-01},
journal = {International Journal of Micro Air Vehicles},
volume = {10},
number = {2},
pages = {125–239},
publisher = {Multi-Science Publishing Co. Ltd},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Julien Marzat; Guido de Croon; Friedrich Fraundorfer; Pascal Morin; Antonios Tsourdos Editorial for special collection on the estimation and control of MAV navigation in GPS-denied cluttered environments (Journal Article) In: International Journal of Micro Air Vehicles, vol. 10, no. 2, pp. 125–126, 2018, ISSN: 1756-8293. @article{bf0fb194b2d04d24b19ee8d80fa16f43,
title = {Editorial for special collection on the estimation and control of MAV navigation in GPS-denied cluttered environments},
author = {Julien Marzat and Guido de Croon and Friedrich Fraundorfer and Pascal Morin and Antonios Tsourdos},
url = {https://research.tudelft.nl/en/publications/editorial-for-special-collection-on-the-estimation-and-control-of},
doi = {10.1177/1756829318772901},
issn = {1756-8293},
year = {2018},
date = {2018-06-01},
journal = {International Journal of Micro Air Vehicles},
volume = {10},
number = {2},
pages = {125–126},
publisher = {Multi-Science Publishing Co. Ltd},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
E. J. J. Smeur; G. C. H. E. Croon; Q. Chu Cascaded incremental nonlinear dynamic inversion for MAV disturbance rejection (Journal Article) In: Control Engineering Practice, vol. 73, pp. 79–90, 2018, ISSN: 0967-0661. @article{3079ef6f907b4b55b21f4a3ad8b65401b,
title = {Cascaded incremental nonlinear dynamic inversion for MAV disturbance rejection},
author = {E. J. J. Smeur and G. C. H. E. Croon and Q. Chu},
url = {https://research.tudelft.nl/en/publications/cascaded-incremental-nonlinear-dynamic-inversion-for-mav-disturba},
doi = {10.1016/j.conengprac.2018.01.003},
issn = {0967-0661},
year = {2018},
date = {2018-04-01},
journal = {Control Engineering Practice},
volume = {73},
pages = {79--90},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
H. W. Ho; C. De Wagter; B. D. W. Remes; G. C. H. E. Croon Optical-Flow based Self-Supervised Learning of Obstacle Appearance applied to MAV Landing (Journal Article) In: Robotics and Autonomous Systems, vol. 100, pp. 78–94, 2018, ISSN: 0921-8890. @article{8b00a12becce426c91c9a2c0d35ee7fdb,
title = {Optical-Flow based Self-Supervised Learning of Obstacle Appearance applied to MAV Landing},
author = {H. W. Ho and C. De Wagter and B. D. W. Remes and G. C. H. E. Croon},
url = {https://research.tudelft.nl/en/publications/optical-flow-based-self-supervised-learning-of-obstacle-appearanc},
doi = {10.1016/j.robot.2017.10.004},
issn = {0921-8890},
year = {2018},
date = {2018-02-01},
journal = {Robotics and Autonomous Systems},
volume = {100},
pages = {78–94},
publisher = {Elsevier},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Sihao Sun; Leon Sijbers; Xuerui Wang; Coen Visser High-Speed Flight of Quadrotor Despite Loss of Single Rotor (Journal Article) In: IEEE Robotics and Automation Letters, vol. 3, no. 4, pp. 3201 – 3207, 2018, ISSN: 2377-3766, (Green Open Access added to TU Delft Institutional Repository ‘You share, we take care!’ – Taverne project https://www.openaccess.nl/en/you-share-we-take-care Otherwise as indicated in the copyright section: the publisher is the copyright holder of this work and the author uses the Dutch legislation to make this work public.). @article{SunEtAl2018,
title = {High-Speed Flight of Quadrotor Despite Loss of Single Rotor},
author = {Sihao Sun and Leon Sijbers and Xuerui Wang and Coen Visser},
url = {https://research.tudelft.nl/en/publications/high-speed-flight-of-quadrotor-despite-loss-of-single-rotor},
doi = {10.1109/LRA.2018.2851028},
issn = {2377-3766},
year = {2018},
date = {2018-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {3},
number = {4},
pages = {3201 – 3207},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
note = {Green Open Access added to TU Delft Institutional Repository ‘You share, we take care!’ – Taverne project https://www.openaccess.nl/en/you-share-we-take-care Otherwise as indicated in the copyright section: the publisher is the copyright holder of this work and the author uses the Dutch legislation to make this work public.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Sophie Armanini; Matej Karasek; Coen Visser Global Linear Parameter-Varying Modeling of Flapping-Wing Dynamics Using Flight Data (Journal Article) In: Journal of Guidance, Control, and Dynamics: devoted to the technology of dynamics and control, vol. 41, no. 11, pp. 2338–2360, 2018, ISSN: 0731-5090. @article{087b6ba9319f4eecb60cd70e96b9aa5d,
title = {Global Linear Parameter-Varying Modeling of Flapping-Wing Dynamics Using Flight Data},
author = {Sophie Armanini and Matej Karasek and Coen Visser},
url = {https://research.tudelft.nl/en/publications/global-linear-parameter-varying-modeling-of-flapping-wing-dynamic},
doi = {10.2514/1.G003505},
issn = {0731-5090},
year = {2018},
date = {2018-01-01},
journal = {Journal of Guidance, Control, and Dynamics: devoted to the technology of dynamics and control},
volume = {41},
number = {11},
pages = {2338–2360},
publisher = {American Institute of Aeronautics and Astronautics Inc. (AIAA)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Kevin Hecke; Guido Croon; Laurens Maaten; Daniel Hennes; Dario Izzo Persistent self-supervised learning: From stereo to monocular vision for obstacle avoidance (Journal Article) In: International Journal of Micro Air Vehicles, vol. 10, no. 2, pp. 186–206, 2018, ISSN: 1756-8293. @article{295dfbba6e4f473c81cd4f83ae5b9601,
title = {Persistent self-supervised learning: From stereo to monocular vision for obstacle avoidance},
author = {Kevin Hecke and Guido Croon and Laurens Maaten and Daniel Hennes and Dario Izzo},
url = {https://research.tudelft.nl/en/publications/persistent-self-supervised-learning-from-stereo-to-monocular-visi},
doi = {10.1177/1756829318756355},
issn = {1756-8293},
year = {2018},
date = {2018-01-01},
journal = {International Journal of Micro Air Vehicles},
volume = {10},
number = {2},
pages = {186–206},
publisher = {Multi-Science Publishing Co. Ltd},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
H. W. Ho; G. C. H. E. Croon; E. Kampen; Q. P. Chu; M. Mulder Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing (Journal Article) In: IEEE Transactions on Robotics, vol. 34, no. 2, pp. 508 – 516, 2018, ISSN: 1552-3098. @article{8883e6903ecc4f86b06c02909678b094,
title = {Adaptive Gain Control Strategy for Constant Optical Flow Divergence Landing},
author = {H. W. Ho and G. C. H. E. Croon and E. Kampen and Q. P. Chu and M. Mulder},
url = {https://research.tudelft.nl/en/publications/adaptive-gain-control-strategy-for-constant-optical-flow-divergen},
doi = {10.1109/TRO.2018.2817418},
issn = {1552-3098},
year = {2018},
date = {2018-01-01},
journal = {IEEE Transactions on Robotics},
volume = {34},
number = {2},
pages = {508 – 516},
publisher = {Institute of Electrical and Electronics Engineers (IEEE)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
Mario Coppola; Kimberly N. McGuire; Kirk Y. W. Scheper; Guido C. H. E. Croon On-board communication-based relative localization for collision avoidance in Micro Air Vehicle teams (Journal Article) In: Autonomous Robots, vol. 42, no. 8, pp. 1787–1805, 2018, ISSN: 0929-5593. @article{0ee50b7413ad4992a0e3219ab9403636,
title = {On-board communication-based relative localization for collision avoidance in Micro Air Vehicle teams},
author = {Mario Coppola and Kimberly N. McGuire and Kirk Y. W. Scheper and Guido C. H. E. Croon},
url = {https://research.tudelft.nl/en/publications/on-board-communication-based-relative-localization-for-collision-},
doi = {10.1007/s10514-018-9760-3},
issn = {0929-5593},
year = {2018},
date = {2018-01-01},
journal = {Autonomous Robots},
volume = {42},
number = {8},
pages = {1787–1805},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
 Whereas insects seem to control their flight effortlessly with the help of optical flow, robots that attempt to do the same run into problems. We propose as a solution a learning process that allows robots to see distances by means of visual appearance (colors, textures, shapes). Would it be possible that insects do the same?
Whereas insects seem to control their flight effortlessly with the help of optical flow, robots that attempt to do the same run into problems. We propose as a solution a learning process that allows robots to see distances by means of visual appearance (colors, textures, shapes). Would it be possible that insects do the same?