In September, the MAVLab was at the International Micro Air Vehicle (IMAV) Conference and Competition in Aachen! The IMAV is a special competition, because it not only offers the opportunity to present cutting-edge drone research but also includes a drone competition! RTW Aachen organized the big event this year, with an indoor and an outdoor competition.
The outdoor competition was themed around providing help to find missing hikers. Tasks for the drones included mapping of the area to find any trace the hikers left behind, following ground rescue vehicles, and automatically counting the number of hikers and assessing their health states.
We believe hybrid drones are promising platforms for this type of mission, which combine a wing for fast and efficient forward flight with vertical takeoff and landing capabilities. The efficient flight enables the vehicles to find hikers covering great distances, while the hovering capabilities come in handy to provide close-up camera footage.
We brought three drones for the outdoor competition: two camera-equipped over-actuated quadplanes, and a tiltrotor tailsitter, all of which are hybrid drones. A team of motivated graduate students had been working months on preparing the hardware, implementing control software and implementing computer vision algorithms.


In spite of our preparation, we found ourselves solving bugs deep into the night in the days prior to the competition. Even worse, during the practice day, a last-minute hardware change caused interference on the tailsitter drone, which eventually led to a crash just two days before the competition. Still, through perseverance, we managed to show up at the day of the competition with three working drones and high hopes!
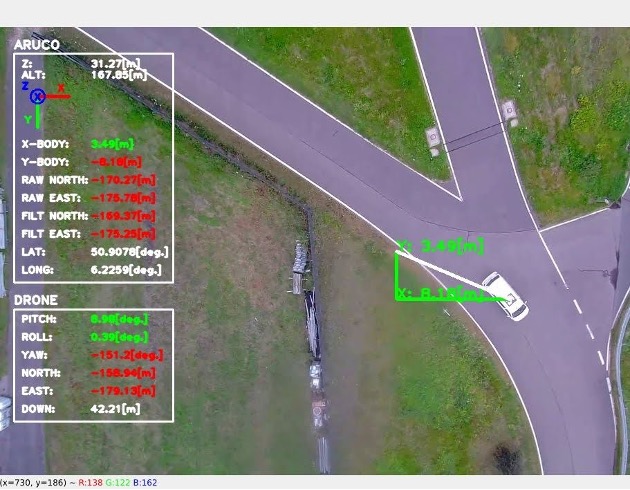
During our competition slot, the operation set out as planned: while the first quadplane was doing the mapping of the area, the second one was following the moving car based on the ArUco marker. It utilized a Kalman filter that used the known layout of the road to predict the position of the car based on the states in the filter, with position measurements coming from ArUco marker detection. On the way back, it flew over the locations of the hikers, such that we could run our automatic hiker-counter and health state assessment neural network. Unfortunately, the images were taken from a higher altitude than anticipated, which the network could not deal with. Visually, the health state could be discerned though.
 Then, the tailsitter set out to cover as much distance as possible, while at the same time performing a dynamic waypoint flying mission. After a bit of a rough takeoff, this went smoothly, up until the point that four dynamic waypoints were sent to the drone. The third waypoint’s altitude was too high due to a software bug, causing the drone to pass the soft geofence and returning to land.
Then, the tailsitter set out to cover as much distance as possible, while at the same time performing a dynamic waypoint flying mission. After a bit of a rough takeoff, this went smoothly, up until the point that four dynamic waypoints were sent to the drone. The third waypoint’s altitude was too high due to a software bug, causing the drone to pass the soft geofence and returning to land.
Though not everything went as planned, we were proud to show the performance of our innovative platforms. With impressive results, our score led to a fourth place, only a fraction of a point behind the team that got the third place! More points could have been scored by performing the missions faster, and by focusing more on the precision landing. However, just demonstrating our innovative vehicles that were capable of performing the missions presented at IMAV 2023 made us feel like winners already!
Since our research was most aligned with the outdoor tasks, that was where our focus went. Nonetheless, we participated indoors as well with a flapper that was able to fly through a gate autonomously based on computer vision!
Thanks to the Team:

Msc. students: Jan Kulik, Kevin Malkow, Sergio Marin Petersen, Yamac Birol
PhD. Students: Alessandro Mancinelli, Aga Nowak, Ziqing Ma
Staff: Christophe de Wagter, Ewoud Smeur, Guido de Croon