Design and Control of A Tilt-Rotor Tailsitter Aircraft with Pivoting VTOL Capability
Content:
In our newly accepted paper in IEEE Robotics and Automation Letters, we present a novel TRE-tailsitter UAV that integrates independently tilting rotors with elevon control surfaces. This design ensures sufficient control authority and avoids actuator saturation across the entire autonomous flight envelope, also enabling robust and fully autonomous vertical takeoff and landing through a unique pivoting maneuver.
Challenges for Tailsitters
Hybrid drones capable of both hover and efficient forward flight have attracted significant interest in recent years. Among them, tailsitters are particularly appealing due to their mechanical simplicity and seamless transition between hover and cruise. Despite promising advancements, tailsitters face two significant challenges that hinder their broader application.
1. Control Authority and Actuator Saturation:
Traditional tailsitters with only aerodynamic control surfaces that function like elevons (E-tailsitters) suffer from limited effectiveness in vertical and transitional flight, while tailsitters using only tilt-rotors for control moment generation (TR-tailsitters) often lack sufficient roll authority in the forward flight phase.
2.Robust Vertical Takeoff and Landing (VTOL):
Conventional tailsitters typically require an upright stand on the ground, necessitating structural elements like landing gear to support vertical posture. These components add weight, drag, and complexity, and make the vehicle vulnerable in windy or uneven terrain. If the vehicle tips over, it often requires human intervention to recover, reducing autonomy and deployment flexibility.
A New Solution
In our work, we present a tailsitter with both tiltrotors and control surfaces (TRE-tailsitter) that combines the effective pitch control of tilting rotors in hover with the stable roll control provided by elevon deflections during the forward flight, guaranteeing control authority across the full autonomous flight envelope.
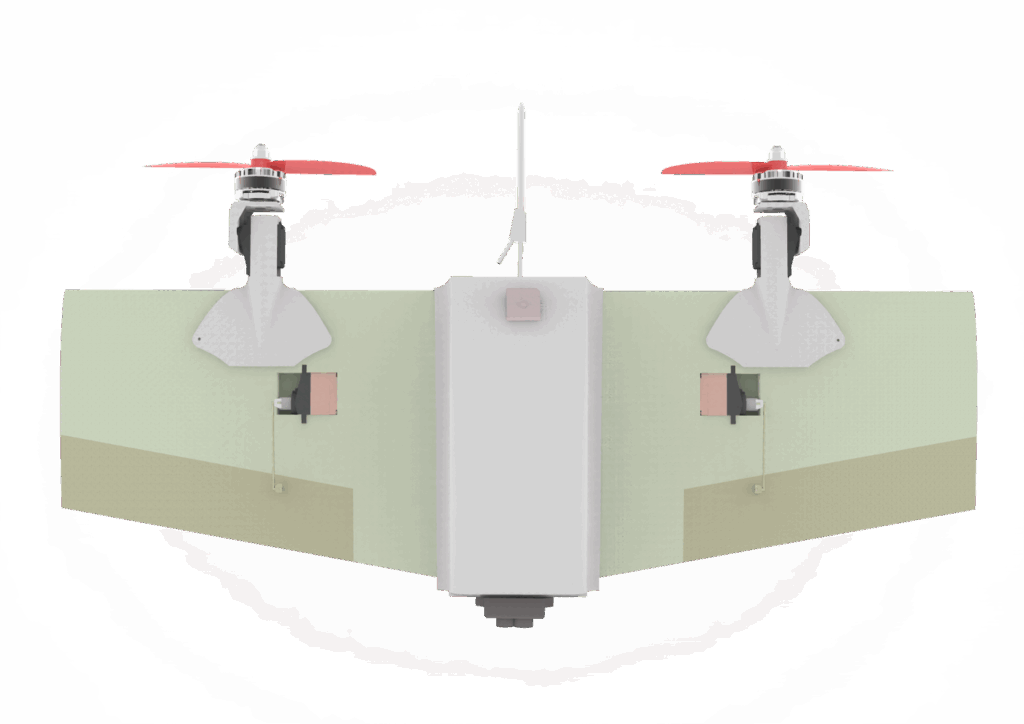
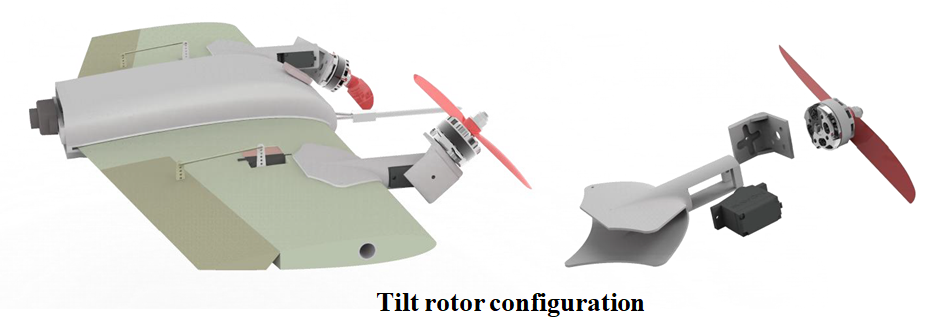
The top view and tilt rotor configuration of TRE-tailsitter
Furthermore, the incorporation of rotor tilt not only enhances control but also introduces a novel pivoting takeoff and landing capability, eliminating the reliance on auxiliary supporting structures or landing gear commonly required by traditional E-tailsitters.
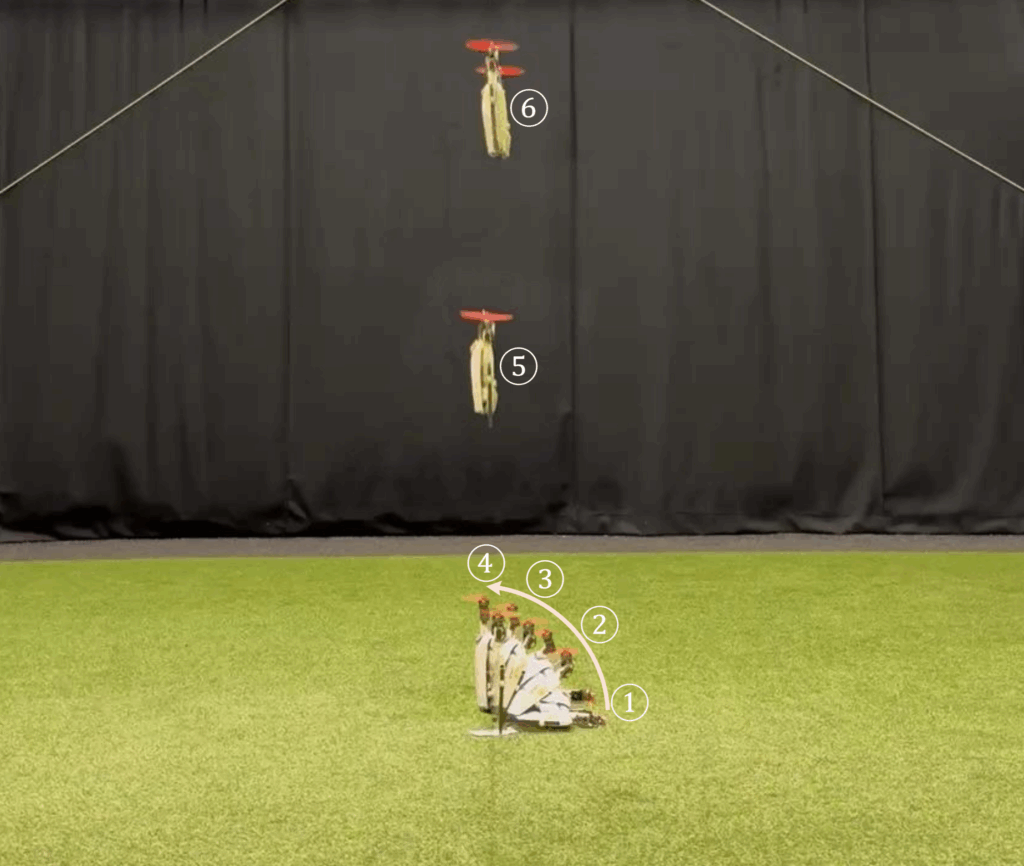

Indoor and outdoor demonstrations of pivoting takeoff maneuver
The proposed design has been validated in both wind tunnel experiments and comparative outdoor tests, showing that the TRE-tailsitter outperforms existing TR- and E-tailsitter designs, particularly during transitions and descent. This breakthrough offers a promising step forward for robust autonomous flight, with potential applications in drone racing, environmental monitoring, and field robotics.
Link to paper (IEEE RA-L): https://doi.org/10.1109/LRA.2025.3563821