The work from PhD candidate Liming Zheng and Assistant Professor Salua Hamaza from the BioMorphic Intelligence Lab was published in the journal of IEEE Robotics and Automation Letters in March 2024.
Our innovative study, ALBERO, introduces a groundbreaking framework aimed at enhancing quadrotor perching capabilities on natural, inclined tree branches. This advancement addresses the challenge of finding suitable horizontal perches, which often leads to increased search times and depleted drone endurance.
Key Features and Methodology
Central to ALBERO is its active gripper design, which stands out for its ultra-fast grasping speed – 67 milliseconds for the larger gripper and an impressive 42 milliseconds for the smaller version. This rapid action is critical for effective perching on steeply inclined branches found in natural settings. Additionally, the design boasts a high power-to-weight ratio, scalability, and exceptional energy efficiency. Its scalability is a significant feature, allowing easy adaptation to different drone sizes, enhancing the system’s versatility across various drone models.
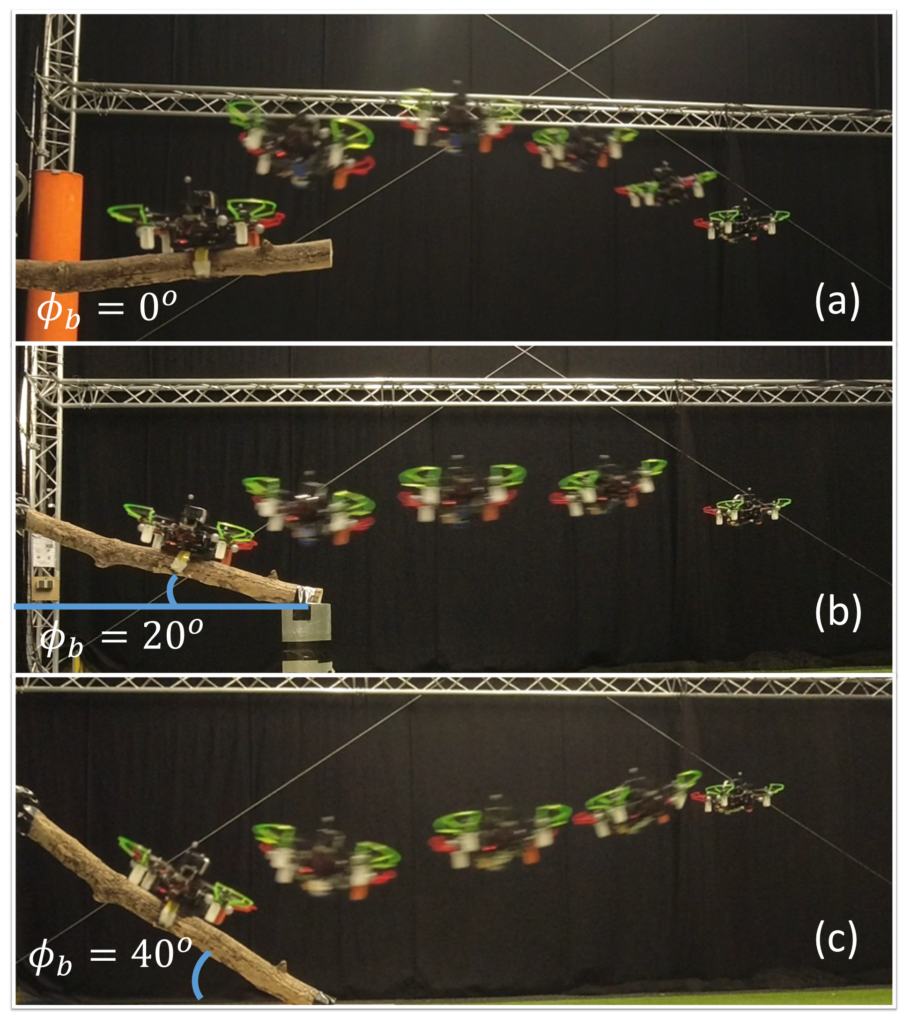
Alongside this mechanical innovation, we have developed a specialized motion planner tailored for the dynamic challenges of agile perching maneuvers. This planner has been validated through extensive real-world flight experiments, demonstrating its effectiveness in dynamically perching on inclined branches.
Achievements in XPRIZE Rainforest Competition
Our research’s practical and innovative nature was recognized at the XPRIZE Rainforest competition held in Singapore in June 2023. Competing as a semifinalist, our team showcased the ALBERO system’s capabilities, earning us a place in the final list of this esteemed competition. This recognition highlights the potential impact of our work in drone technology and environmental applications.

Results
Our system’s efficacy was proven through rigorous indoor and outdoor testing. Outdoor experiments, particularly, demonstrated the system’s real-world applicability, with successful perching on naturally inclined tree branches, guided by visual feedback from a First Person View (FPV) camera.

Conclusion and Future Directions
ALBERO marks a significant leap in drone interaction with natural environments. The combination of our rapid-action, scalable gripper design and advanced motion planning algorithm paves the way for more efficient and versatile drone operations outdoors. Future efforts will focus on integrating computer vision for accurate outdoor pose estimation, further enhancing the reliability and range of perching maneuvers in diverse environments.
More information and research from the Biomorphic Intelligence Lab: https://www.tudelft.nl/ai/biomorphic-intelligence-lab