Abstract Biological sensing and processing is asynchronous and sparse, leading to low-latency and energy-efficient perception and action. In robotics, neuromorphic hardware for event-based vision and …
Search Results for:
Abstract Insects have long been recognized for their ability to navigate and return home using visual cues from their nest’s environment. However, the precise mechanism …
The work from PhD candidate Liming Zheng and Assistant Professor Salua Hamaza from the BioMorphic Intelligence Lab was published in the journal of IEEE Robotics and Automation …

With an escalating demand for quadcopters in emergency response, inspection and delivery, the need for speed and energy efficiency is paramount. However, developing autonomous systems …
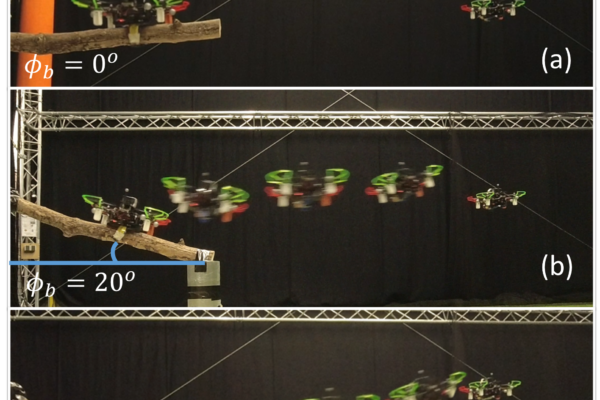
With a decade-long research efforts in the field of aerial manipulation, it is evident how we are still far from achieving dynamic aerial physical interaction …
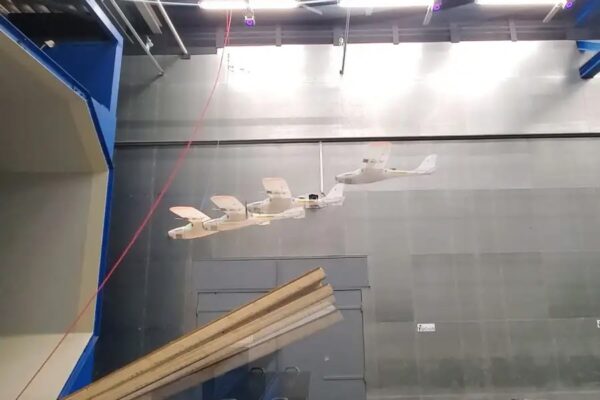
Birds display remarkable adaptability in harnessing their surroundings for efficient flight, exemplified by the ingenious behavior observed in Kestrels. These birds employ a unique technique …

In September, the MAVLab was at the International Micro Air Vehicle (IMAV) Conference and Competition in Aachen! The IMAV is a special competition, because it …
Federico Paredes-Vallés, Kirk W. Y. Scheper, Christophe De Wagter, Guido C. H. E. de Croon Event cameras have recently gained significant traction …

At ICRA (IEEE International Conference on Robotics and Automation) 2023, MAVLab presented AvoidBench, a high-fidelity vision-based obstacle avoidance benchmarking suite for multi-rotors. Motivation Vision-based obstacle …
11-15 September 2023, the International Micro Air Vehicle Conference and Competition will be held in Aachen. This event hosts an enthusiastic community of MAV pioneers, …