Professor Guszti Eiben from the Vrije Universiteit Amsterdam will be coming to our faculty at 10:00 on the 18th of March to give a one …
![]()
Micro Air Vehicle Lab – TUDelft
Professor Guszti Eiben from the Vrije Universiteit Amsterdam will be coming to our faculty at 10:00 on the 18th of March to give a one …
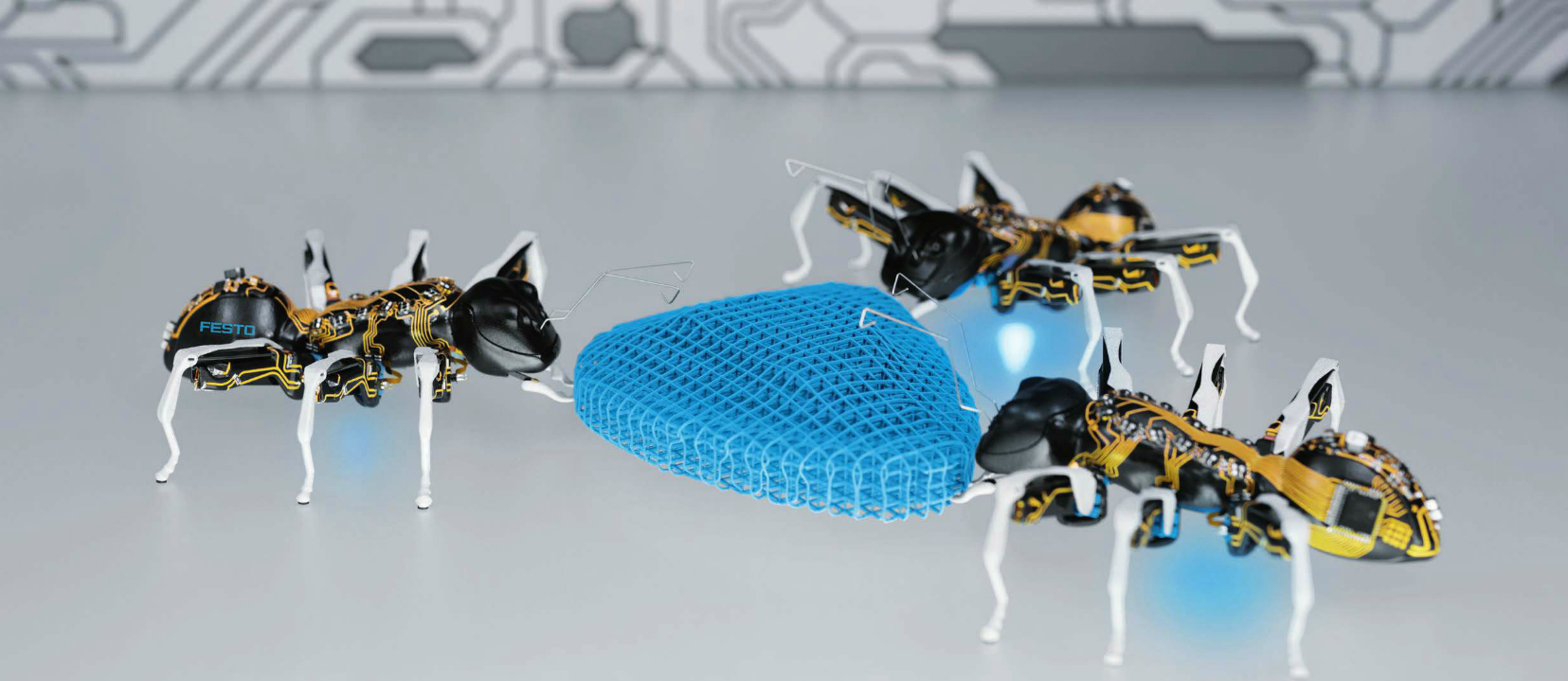
The Festo BionicANT program is using the stereo-vision system developed at the MavLab. https://www.festo.com/group/de/cms/10157.htm All details of the BionicANT can be found in Festo’s BionicANT …
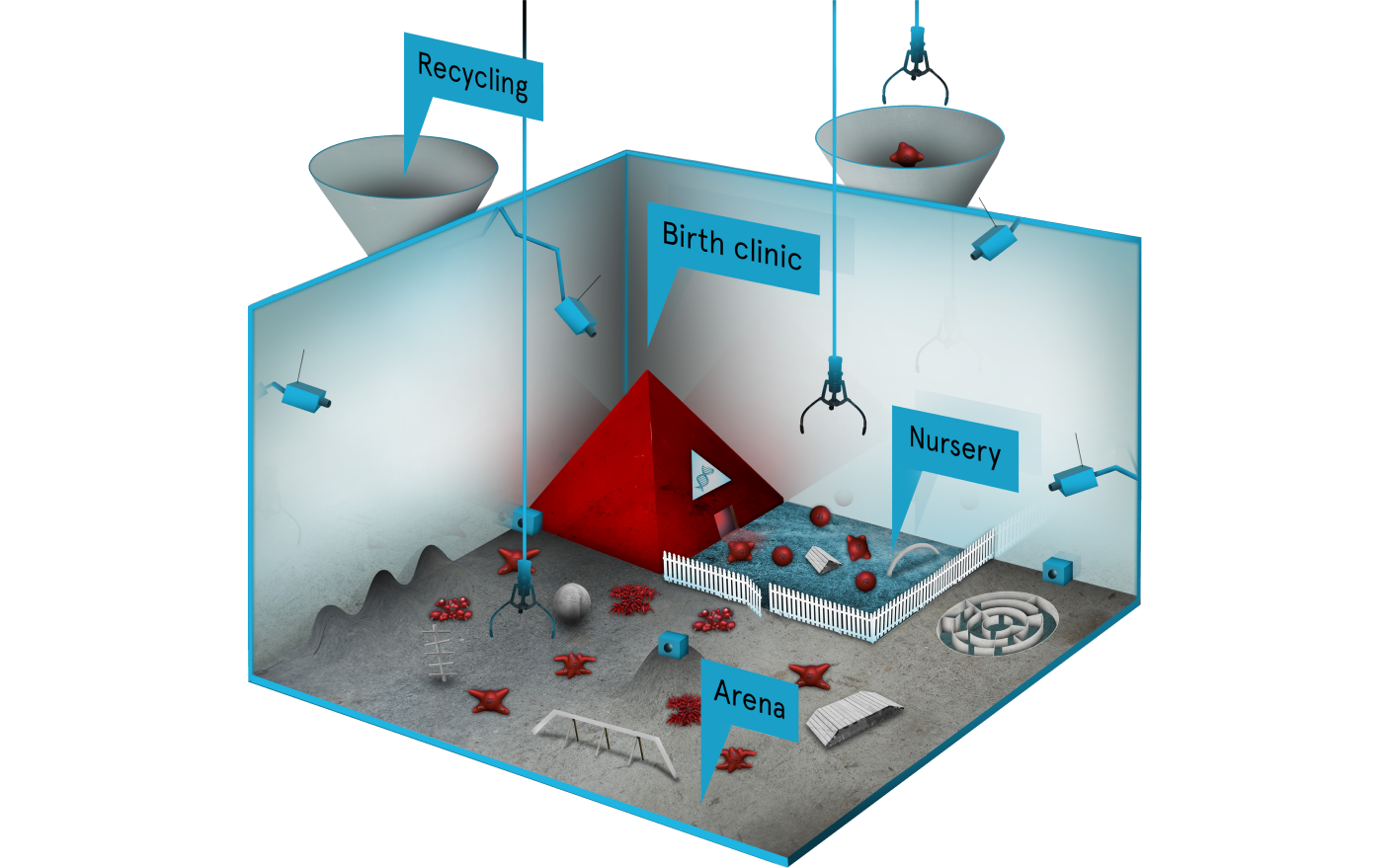
In this project, research is performed on a swarm of MAVs that will be able to search in a large area in order to detect …
