Skip to content
Micro Air Vehicle Lab – TUDelft
home
News
Research
Research Summary
Research
Robots
Code
Datasets
Competitions
Projects
Events
Spinoffs
People
Education
University Courses
Other
Publications and Datasets
Publications
Datasets
Media
Awards
Jobs
Contact
Search for:
search
Search
Search for:
search
Search
News
Research
Show sub menu
Research Summary
Research
Show sub menu
Robots
Code
Datasets
Competitions
Projects
Show sub menu
Events
Spinoffs
People
Education
Show sub menu
University Courses
Other
Publications and Datasets
Show sub menu
Publications
Datasets
Media
Awards
Jobs
Contact
News
Research
Design and Control of A Tilt-Rotor Tailsitter Aircraft with Pivoting VTOL Capability
Posted on
April 24, 2025
April 24, 2025
Competitions
News
Autonomous Drone from TU Delft Defeats Human Champions in Historic Racing First
Posted on
April 16, 2025
May 1, 2025
News
Research
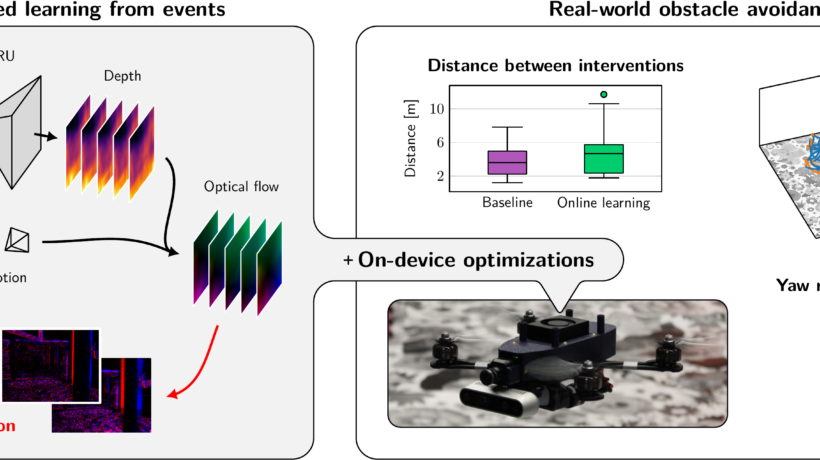
On-Device Self-Supervised Learning of Low-Latency Monocular Depth from Only Events
Posted on
March 24, 2025
June 6, 2025
News
New PhD student: Tom van Dijk