
As is tradition, we will attend IMAV this year, which will be taking place in Madrid.
IMAV offers a unique mix of a competition and a conference. This year, we will take part in the indoor competition in a joint team with the start-up XOSight. XOSight is a Delft based start-up which focuses on warehouse inspection using small drones.
Additionally, we will present 4 papers at the conference. Find out more about them here below.
All proceedings of IMAV are also available in full in the link below.
http://www.imavs.org/papers/2019/imav2019_proceedings.pdf
A Tailless Flapping Wing MAV Performing Monocular Visual Servoing Tasks
D.A. Olejnik , B.P. Duisterhof , M. Karásek, K.Y.W. Scheper, T. van Dijk, G.C.H.E. de Croon

This paper describes the computer vision and control algorithms used to achieve autonomous flight with a ∼30-gram tailless flapping wing robot. Several tasks are discussed: line following, and circular gate detection and fly-through. The emphasis is on augmenting traditional techniques with the goal to make these methods work with limited computing power while obtaining robust behaviour.
Design and Testing of a Vertical take-off and Landing UAV optimized for carrying a Hydrogen Fuel-cell with Pressure Tank
Christophe De Wagter, Bart Remes, Rick Ruisink, Freek van Tienen, Erik van der Horst
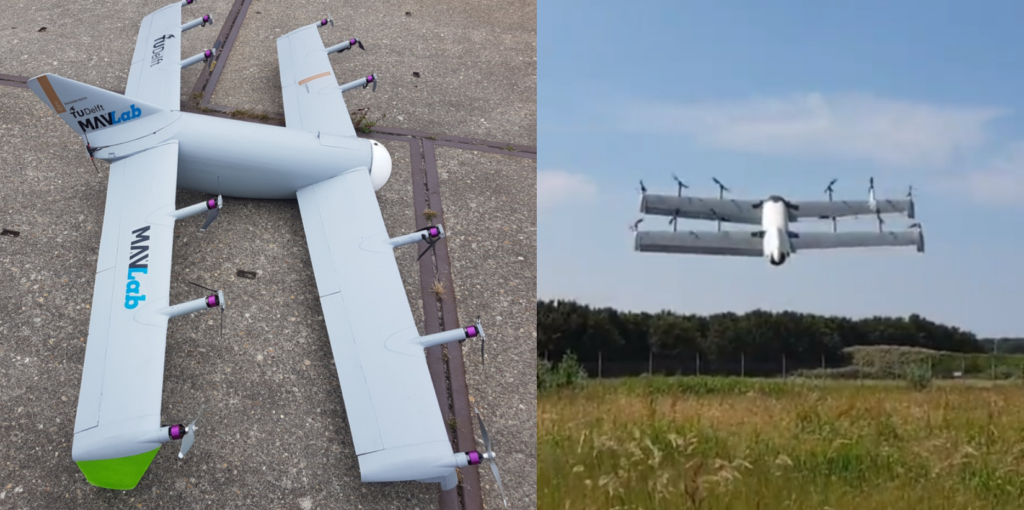
This paper proposes a hybrid transitioning unmanned air vehicle that is optimized towards carrying a hydrogen tank and fuel cell: the Nederdrone. It consists of an angled tandem wing with 12 propellers for the hover, 8 of which are fold-able during forward flight.
Hear-and-avoid for UAVs using convolutional neural networks
Dirk Wijnker, Tom van Dijk, Guido de Croon, Christophe De Wagter

To investigate how a UAV can detect manned aircraft with a single microphone, an audio data set is created in which UAV ego-sound and recorded aircraft sound are mixed together, and a convolutional neural network is used to perform the air traffic detection.
Effects of asymmetrical inflow in forward flight on the deformation of interacting flapping wings
D. N. W. M. Heitzig, B. W. van Oudheusden, D. Olejnik, and M. Karásek
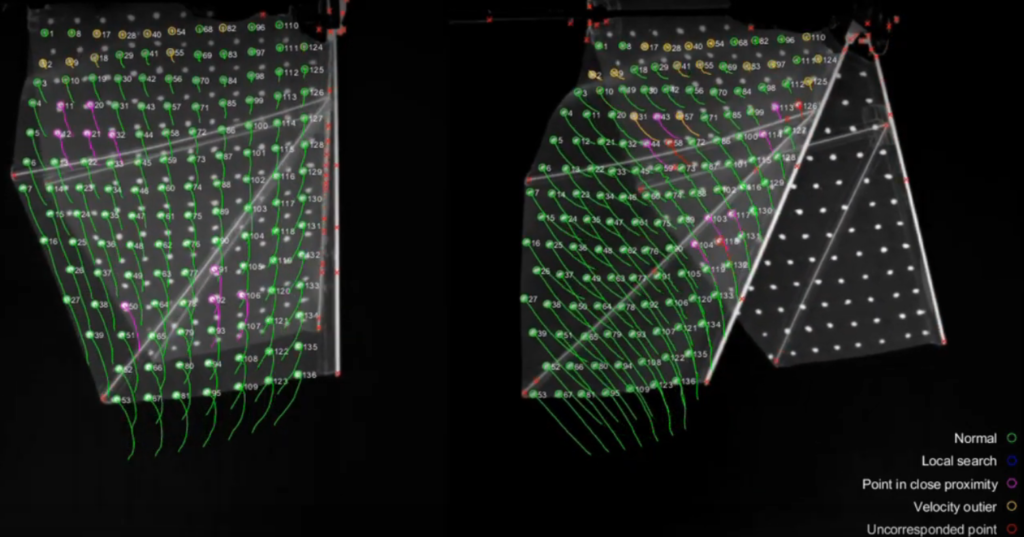
This study investigates the wing deformation of a flapping-wing MAV in climbing and forward flight conditions. A measurement setup was developed that maintains adequate viewing axes of the wings for all pitch angles.